I wrote a very simple RC input to actuator output example code, and then a version using a custom module. Compilation and execution appear to be ok (with the exception of a pwm issue which I’ve posted about separately) but there is one very annoying problem:
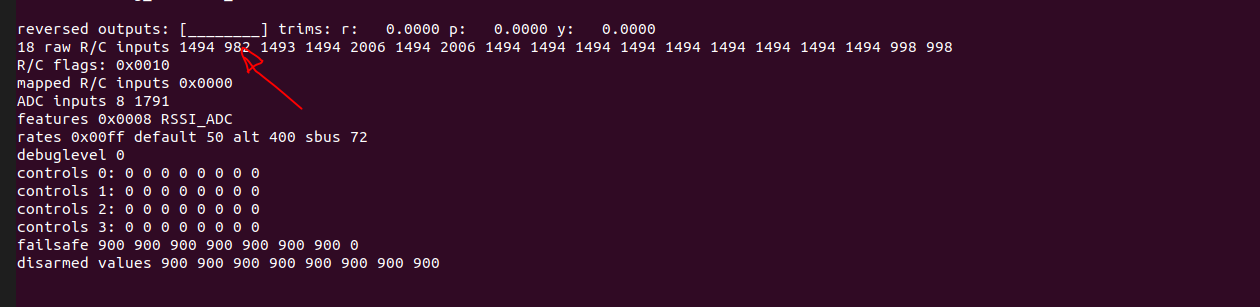
The RC inputs are frozen and won’t update! This happens intermittently and requires multiple reboots to get any updates (though once it’s working it doesn’t appear to fail). I monitor the RC inputs using px4io monitor in the mavlink shell:
I’m using a Pixhawk 4, and I’ve tested this using two separate Pixhawks and have the same issue.
On powerup, the B/E light is sometimes flashing amber, then nothing, then rapidly flashing and then stopping again. The ACT light is flashing blue the whole time. This sequence corresponds to a working rc input.
Often, the B/E light will stay solid, which will correspond to no rc input. Sometimes it will also flash amber at a lower rate; this also corresponds to no rc input. Finally, when no B/E light is on (without the rapid flashing), the rc input is also not working.
Any help at all on this would be greatly appreciated, as currently I have to reboot five to ten times before I get any kind of rc input. Help!