Hello everybody,
I’m investigating a crash I had with pixhawk 4 mini, and I have noticed that my second IMU is super noisy and unbiased
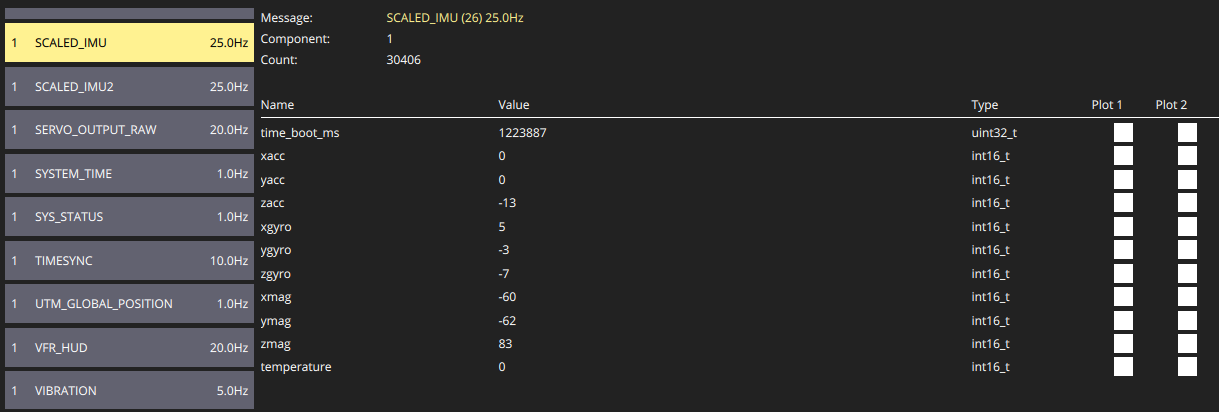
This is IMU1 readings:
And this is IMU2 readings:
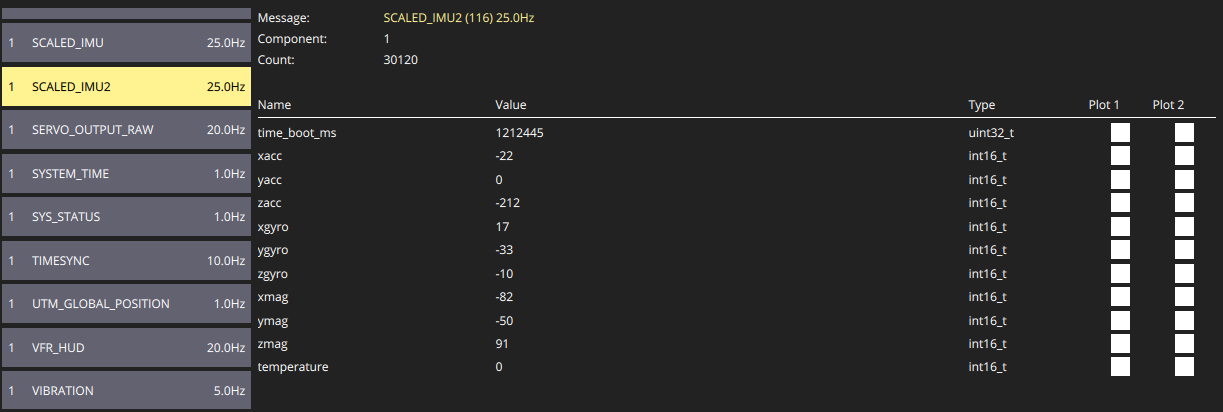
IMU2 acc and gyro readings make no sense, I cannot calibrate them via QGC and I think that the crash happened because ekf2 switched from IMU1 readings to IMU2 for some reason, It then heavily oscillated until it crashed. From my logs of the crash flight and other flights I can see noise and vibrations appear and disappear randomly.
Is there anyway to tell from my flight logs which IMU ekf is using and when?
(If anybody is interested this is a log of these random vibrations: Flight Review)
Best regards,
Max