i have my pixhawk with PX4 firmware, I have done all the calibration in Qgroundtrol,but when I increase the throttle .the quadcopter do not takeoff ,but move to the right, what should I do to solve the problem? thanks for any help!
Are your props mounted in their proper orientation?
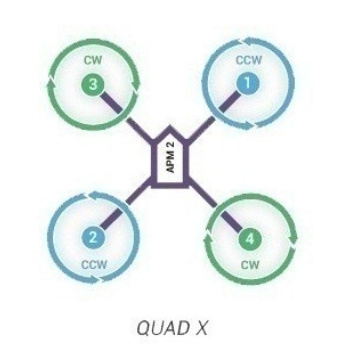 I followed the picture to set my props
I followed the picture to set my props
A quadrotor in manual mode will not hold position. You have to fly it actively as pilot. If you want it to hold position you need to put it into position control (POSCTRL).