I am trying to simulate my custom drone urdf I follow this discussion and make my custom drone. I compiled it and launch from ’ roslaunch px4 mavros_posix_sitl.launch ’ the drone spawn successfully in gazebo but QGC is not connecting
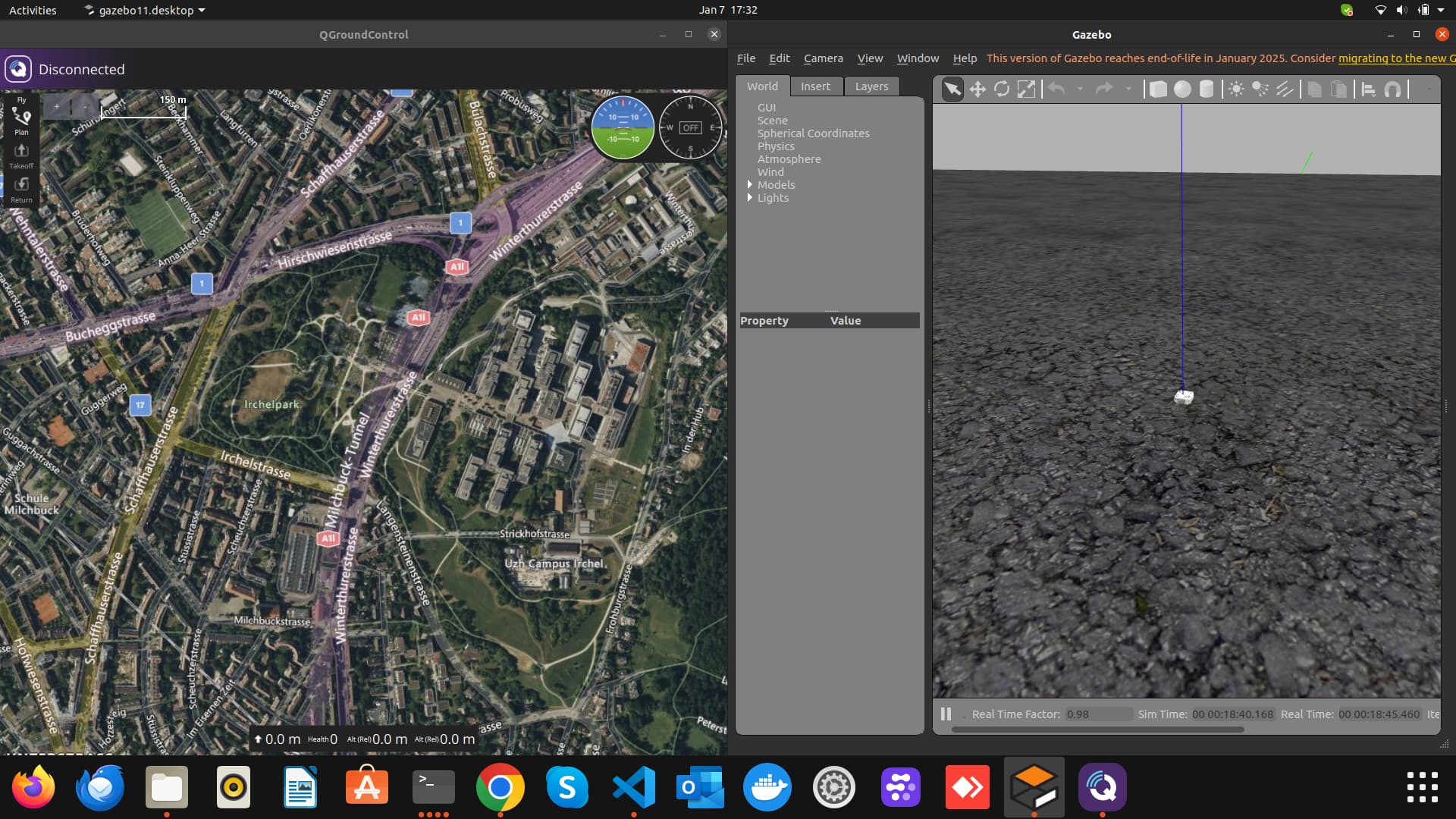
. I check
mavlink plugin i exactly copy from iris model and on rostopic echo /mavros/state it always show false i dont know where i did the mistake.