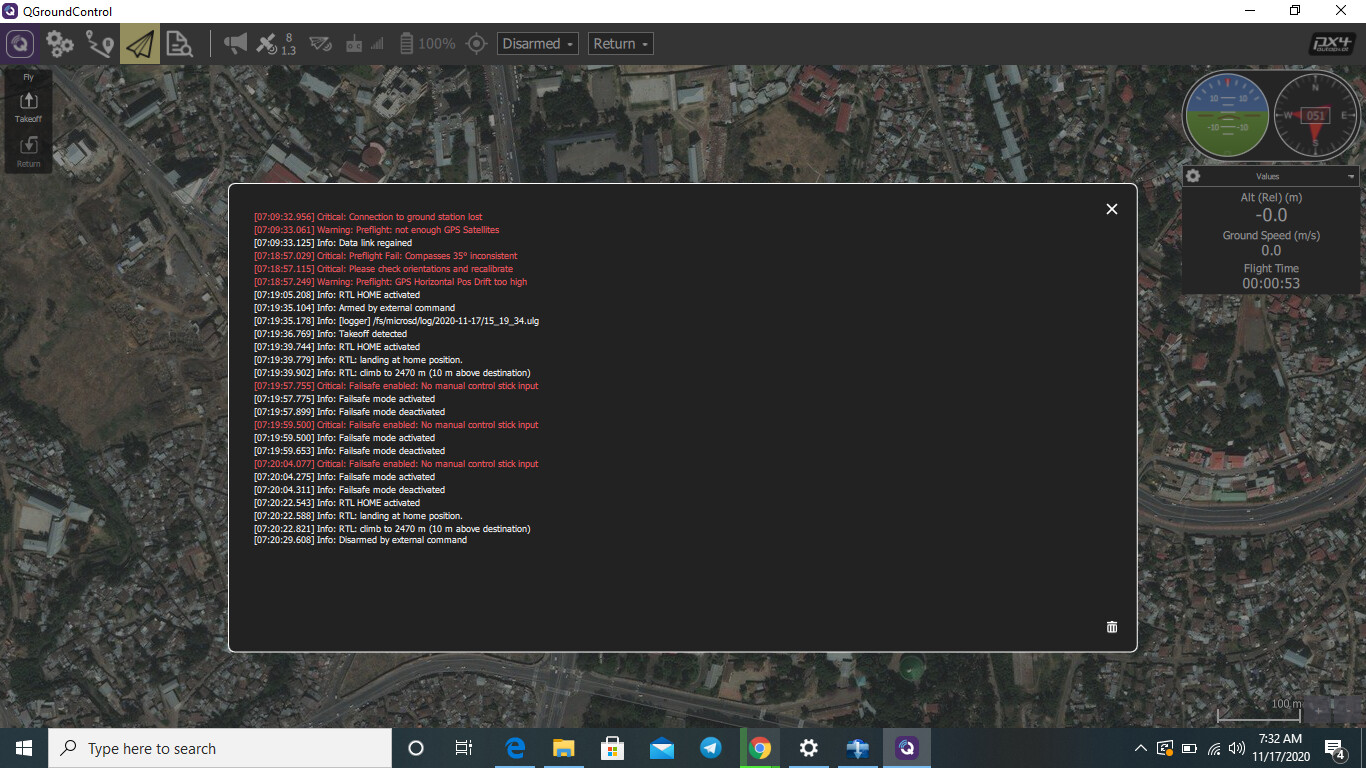
When we tried to take the drone .2 meters with QGC, it went even higher than that, and when we tried to land it with Return Mode. It slowly climbs down and then it activates failsafe mode. What are we missing here? Note: we don’t have RC control. All we have is telemetry radio and QGC. here is the log file.