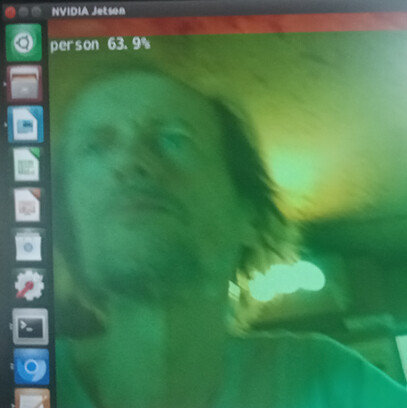
I have a jetson nano that object-recognizes a person (me) and then tries to put my pixhawk 6c px4 x-500 into land mode (testing at home). Having trouble … not getting the heartbeat often when I run the pymavlink program.
To “coax” the 6c to respond with a heartbeat, it seems I can use QGC. QGC is doing soemthing to get the heartbeat… but what?
Any ideas? DO I HAVE TO INITIATE SOMEHOW THE HEARTBEAT, IF SO THEN HOW??? I am trying to send mavlink commands to 6c in response to Jnano object recognizing a person. Everything works, except this (should be simple) heartbeat issue.
follwoing is setup.
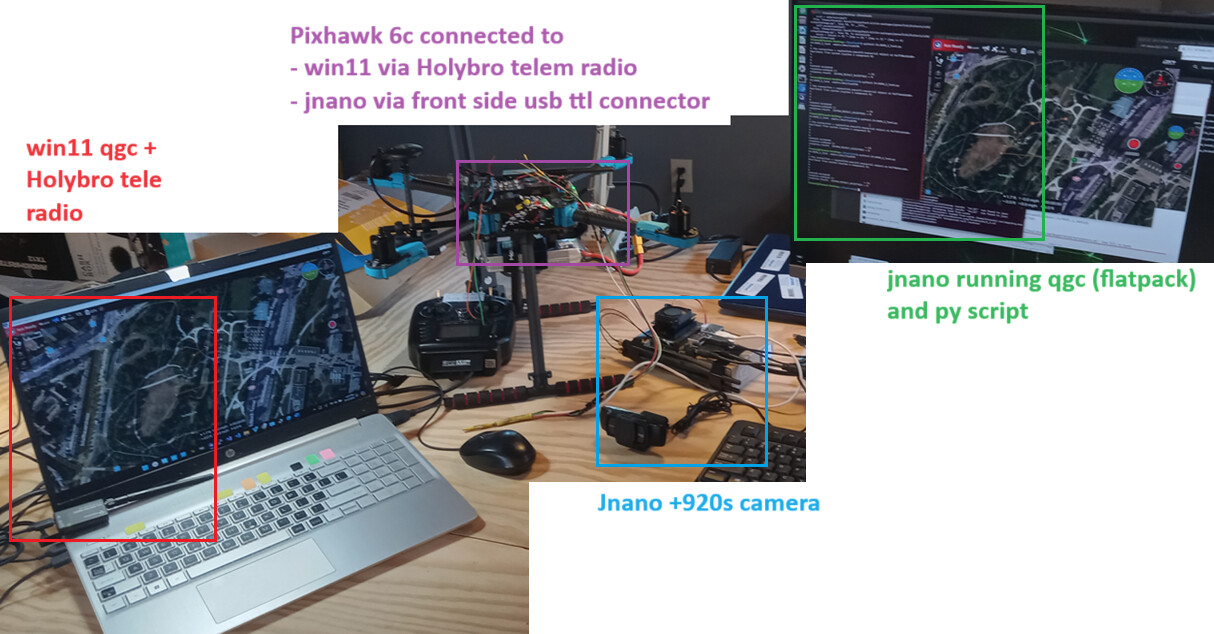
Word file for what I am trying to do (with screenshots; see the two chapters “0615 …” for details of pixhawk 6c <> jnano object recognition tests)
E3-7.2.1b_jnano_pix6c_pymavlink_tests_v04_24.0609_0615
@ E3-7 AI basic examples (2c) - Google Drive
wiki page
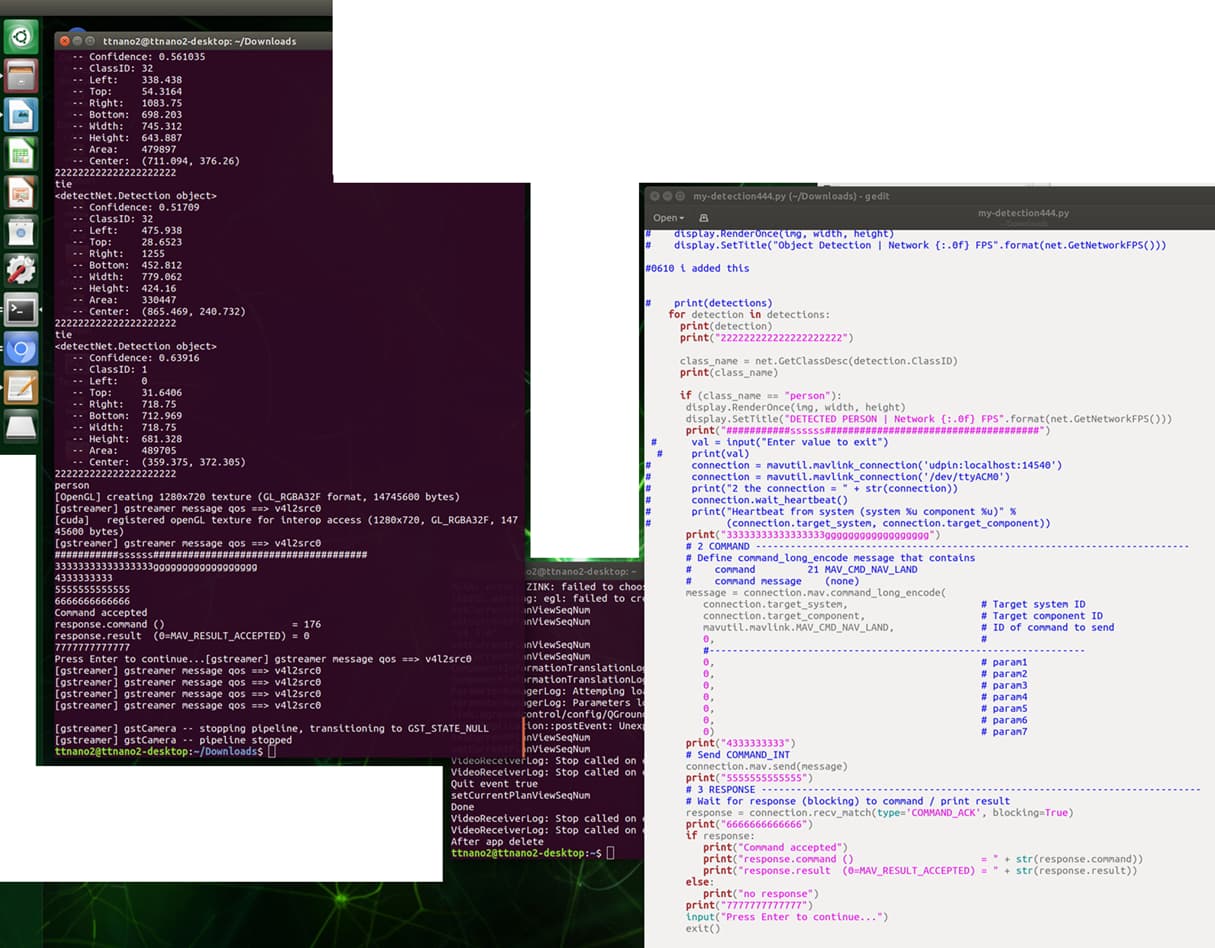
This is typical way i have been running into this problem… Running a py script (first few lines below) on Jnano first time and works. Then I try to run again, and Jnano never gets a heartbeat.
connection = mavutil.mavlink_connection(‘/dev/ttyACM0’)
print("2 the connection = " + str(connection))
connection.wait_heartbeat()
print(“Heartbeat from system (system %u component %u)” % (connection.target_system, connection.target_component))
my actions in detail:
1 not power on RC (tx-12).
2 connect windows11 holybro telem (connects to 6c telem).
2b start qgc
3 start jnano
4 connect 6c usb-ttl to nano usb. 6c powers on. then goes off after a few secs.
5 disconnect usb.
6 battery connect
7 connect usb again.
7b use qgc to set to stabilized.
8 run 24.0609_2_land.py. fails. “device or resourse busy: ‘/dev/ttyACM0’.
9 shutdown qgc on Jnano (it was on).
10 run .py again. BINGO. 6c switches to land mode.
11 10 mins after battery connect, 1-2-3-4 beep starts continuously.
12 disconnect battery. 6c (and other stuff) still powered on.
13 after ~1 min powers down “communication lost”
14 I try again… connect battery to 6c, connect Jnano to 6c, run script… jnano never gets heartbeat.
15 I power off, on, try again, and again, still same problem.
16 I have a terminal with the hungup script waiting for heartbeat.
17 I start qgc (on Jnano). connects. The py script gets the heartbeat.
PS: The details of my experimentation with this are in the docx. The following screenshots show my goal, how the nano recognizes me, then switches the copter to land mode.