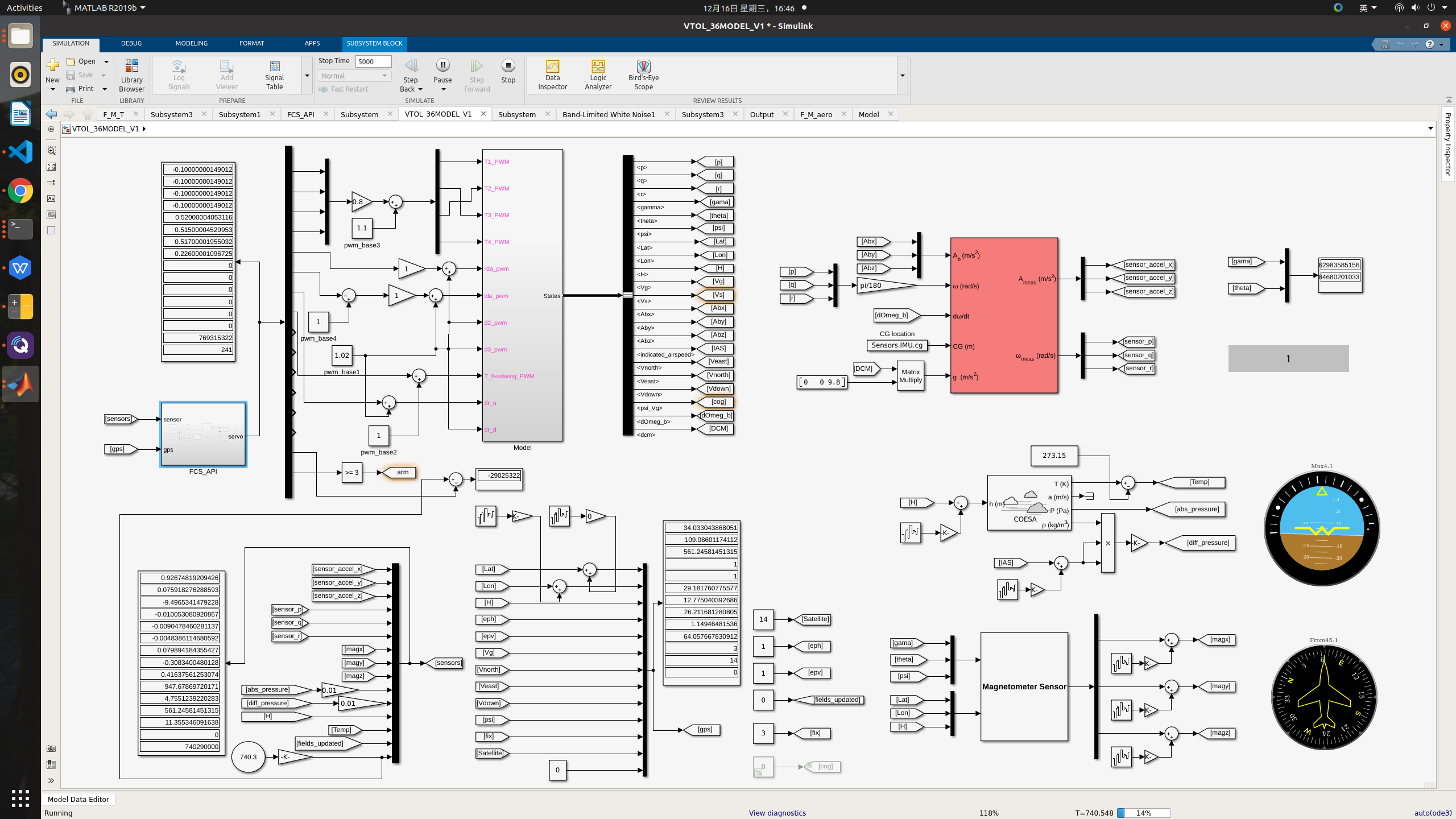
i use simulink HITL , MC position is OK ,but in fw ,if change yaw ,An error occurred

this is log Flight Review
i use simulink HITL , MC position is OK ,but in fw ,if change yaw ,An error occurred
Hi
maybe yaw change rapidly and EKF for calculating global position.
Can you write your instruction for connecting simulink model to px4 sitl ?
I connected my plane model in simulink to ardupilot currently.