Hello everyone, I have a question and hope to get some support.
I wrote a custom serial read/write program that binds to a PX4 serial port via parameters (I used Telem3/4).
However, I noticed that no matter which serial port I select to, when I output custom messages, they are always mixed with px4_info/error messages, as shown in the image below.
What could be causing this issue? I am currently testing on version 1.16.0, using the micoair_h743 board. My serial port initialization code is as follows:
My guess is that either the console is enabled on the serial port, or MAVLink.
Check the defconfig file for what UART the console is on, and check the MAVx_ params for the mavlink configuration (or check mavlink status) in the console.
I just checked the deconfig file and found only CONFIG_USART6_SERIAL_CONSOLE set yes, yet I’m not using USART6.
In QGroundControl I also verified the MAVLink parameters: only TELEM1 is used.
Another new finding: when I deployed the same custom module on v1.14.3, this problem did not occur.
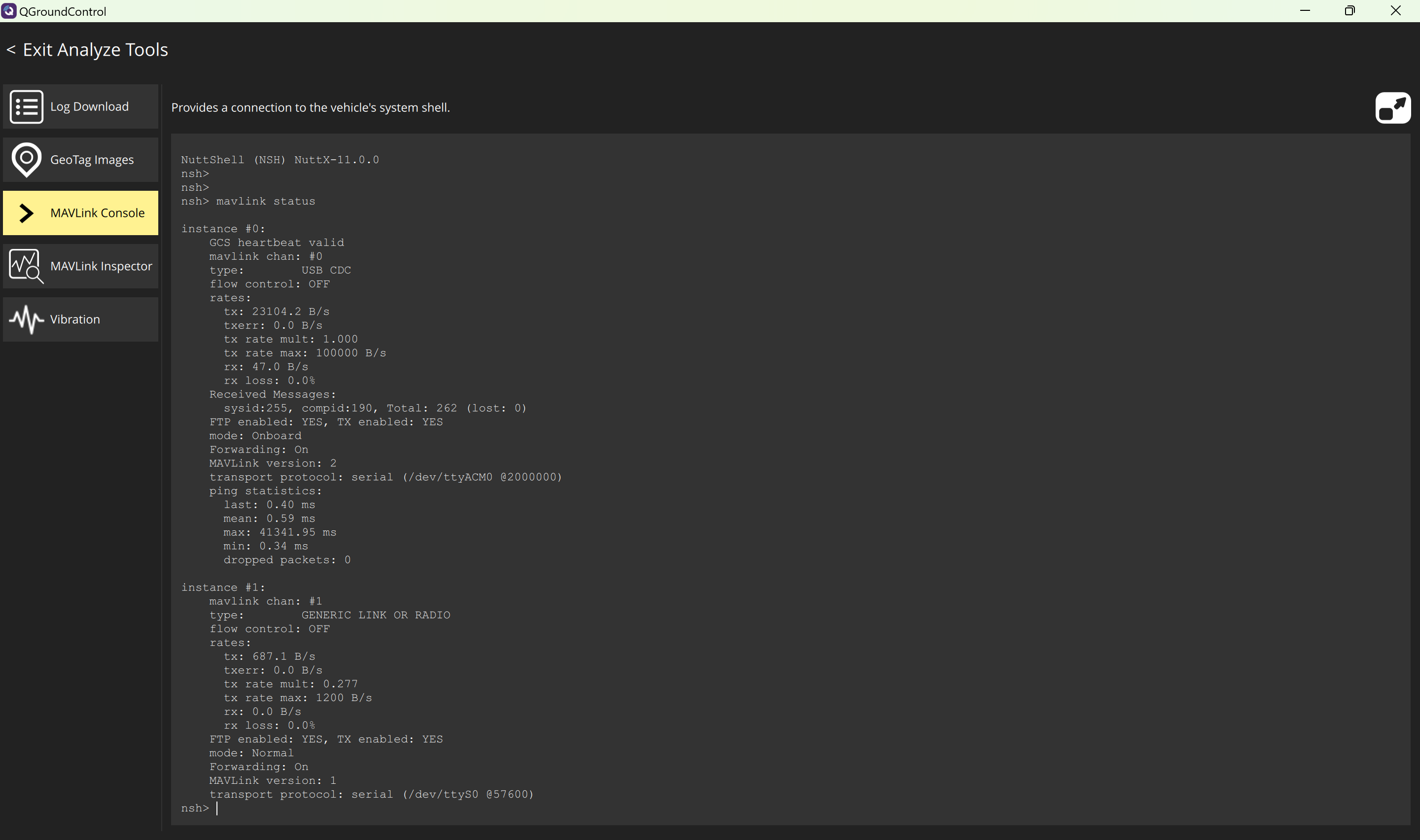
This is the output of mavlink_status , but I think it’s irrelevant; the information printed on the serial port looks more like system_console messages.
i can`t find any config set about *console in deconfig file,But after comparing the defconfig files of v1.14.3 and v1.16.0, I found two options that are absent in v1.16.0:
CONFIG_SERIAL_TERMIOS=y
CONFIG_STM32H7_SERIAL_DISABLE_REORDERING=y
Also, what does the newly added line CONFIG_DRIVERS_CDCACM_AUTOSTART=y in the px4board file of v1.16.0 mean?