saryee
August 20, 2016, 3:22pm
1
Hi there,
Now I’m trying to follow the examples of MAVROS offboard control example at http://dev.px4.io/ros-mavros-offboard.html and Ground Rover with Mavros at https://pixhawk.org/dev/ros/ground_rover .
The hardware is pixhawk and the firmware is latest px4 native stack.
I did like this:
Then I changed to offboard mode and armed the vehicle.
header:
Then I tried
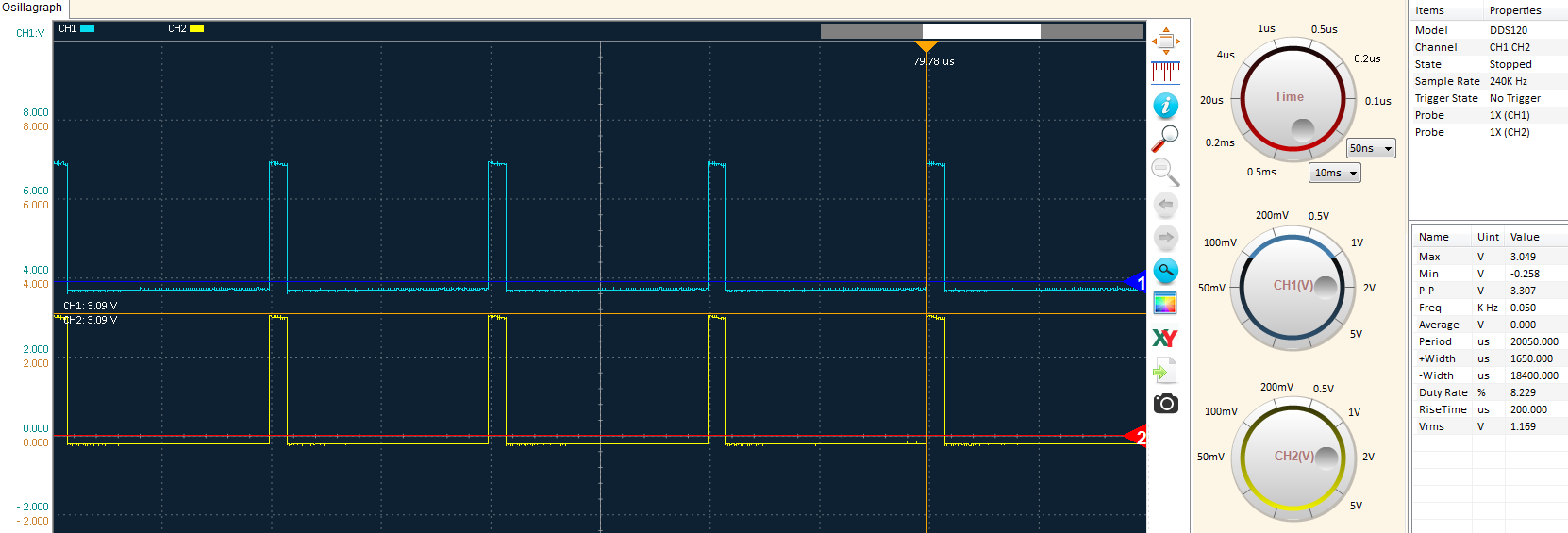
But I couldn’t see any change on the main output.
Here is the waveform.
Could I get any suggestion on what to check?
Many thanks!
saryee
August 20, 2016, 3:27pm
2
Here is the parameter file.
Onboard parameters for vehicle 1
MAV ID COMPONENT ID PARAM NAME VALUE (FLOAT)
1 1 ATT_VIBE_THRESH 0.200000002980232239 9
Thanks!
saryee
August 22, 2016, 3:21pm
3
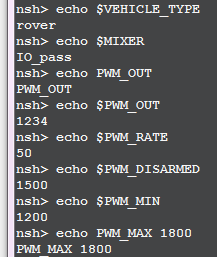
I checked the pwm and mixer in the shell.
What I ran “nsh> pwm rate -c 1234 -r 100” and “nsh> pwm rate -c 1234 -r 50”, I can see the pwm rate changing to 100 Hz then back to 50 Hz.
Which node polls that parameter change?
Note in ROS1 parameters are stored in master and nodes can’t subscribe to param change, only inefficient poll loop.
saryee
August 22, 2016, 5:13pm
5
Thank you very much for your reply! I’ll check as you suggested.
ealdaz
April 10, 2017, 4:49pm
6
Not sure if you’re still stuck with this, but I can’t see that you’re running the node that is publishing the mavros/actuator_control topic
BTW I think the example is old, in order to get it compiled I had to do a number of changes:
The 3 modified lines are below:
#include <mavros_msgs/ActuatorControl.h>
ros::Publisher actuator_controls_pub = nh.advertise<mavros_msgs::ActuatorControl>("/mavros/actuator_control", 1000)
mavros_msgs::ActuatorControl actuator_control_msg;
Seemed to work fine for me in SITL