I am trying to test an optical flow position hold module I have created with a camera, lidar and raspberry pi. I am sending the OPTICAL_FLOW_RAD and DISTANCE_SENSOR message but during my test flight I couldn’t turn on position hold without the GPS.
What should I be looking at or parameters should I be changing to test this properly? I have included the log below. It is activating a failsafe which I think is because velocity is too high but it was within 30m of the starting location during the entire flight.
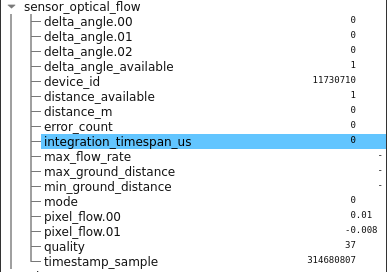
Then do some bench tests, you should see the estimator_status_flags.cs_opt_flow' getting set when the estimator is actually using optical flow data. And the vehicle_optical_flowmessage should also exist (check using thelistener vehicle_optical_flow` command in the mavlink shell).
Thank a lot, I will try and make those changes and conduct a new test flight.
Could you also share how you accessed that data from the log file? I am relatively new to drones and mavlink so I was wondering what is the best tool/code to use when analyzing logs this thoroughly?
And make sure to double check that the EKF is consuming your data (i.e.: check the flag I mentioned in my previous message) before doing another test flight.