I am working on a GPS-denied drone using LIO Lidar inertial odometry feeding Position information to Flight controller via mavros for further doc kindly read VIO doc.
I have Livox MID 360 mounted on a drone with a Pixhawk 6x Pro. In Position flight with rc, it decreases its height Z. So I compare both IMU(Built-in Flight controller & Livox)
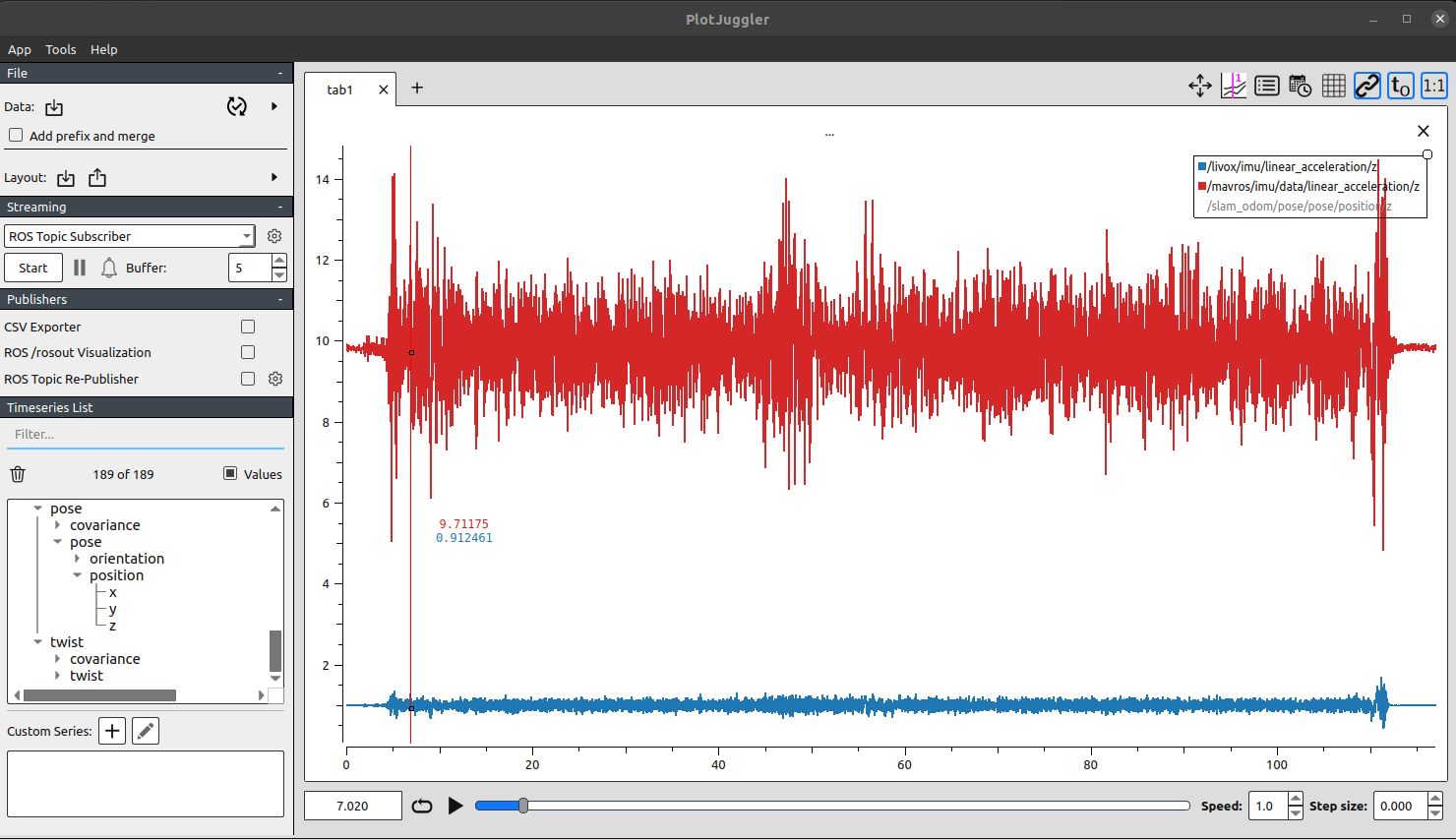
/livox/imu/linear_acceleration/z
/mavros/imu/linear_acceleration/z
I think that Livox does not consider gravity or using incorrect units github-issue, but in graph this is a huge difference. So can ‘EKF2_EV*’ handle such a type of ambiguity?
This topic was automatically closed 90 days after the last reply. New replies are no longer allowed.