Hi guys, relatively new PX4 user here.
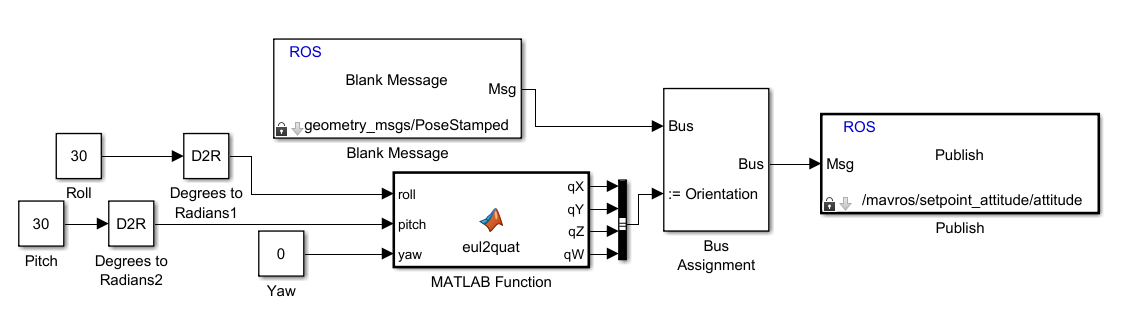
I’m having trouble running offboard mode during Hardware-in-Loop simulation between QGroundControl and XPlane 10. I’ve got all telemetry data successfully off the PX4, but I’m having trouble with publishing Rostopics. The PX4 will enter offboard mode, but I’m unable to get attitude demands to function. Instead, the aircraft will act as in it was in stabilised mode, with the RC inputs still being accepted. They seem to override any commands from ROS. Does anyone have any suggestions about how to stop the RC transmitter inputs from overriding ROS inputs? Shown below are my Simulink blocks for attempting to set a pitch and roll, and my hardware setup.
Thanks a lot!