I want to perform HIL with pixhawk 6x using Telemetry radio(Holybro 100mW 433Mhz) instead of the FTDI converter. So I connect the pixhawk via USB type C to PC.One of the telemetry radio is connected to TELEM1 and the other one is connected to USB to PC.
The Pixhawk linked via USB type C is COM9 and the Telemetry radio is COM10 in my PC.
I want to perform HIL using the UAV dynamics on simulink via “Monitor and tune” (PX4 Autopilot in Hardware-in-the-Loop (HITL) Simulation with UAV Dynamics in Simulink - MATLAB & Simulink - MathWorks United Kingdom ) in Matlab 2023b on windows 11. In the setting QGC as the Mathworks documentation says:
Set HITL mode
Airframe HIL Quadcopter X
Set Flight mode
In the General tab of the settings menu, clear all AutoConnect options except UDP
Set MAV_0_CONFIG to disabled
I’ve set the following parameters too:
COM_RC_IN_MODE to Joystick only (virtual joystick option was selected too)
COM_DISARM_LAND set to -1
NAV_ACC_RAD set to 10
NAV_RCL_ACT to disabled
In the Hardware setting in Simulink in the external mode I’ve selected:
Hardware board serial port /dev/ttyS6 (TELEM1) (I've also set a band rate of 921600)
Host serial port : COM10
I’ve enabled the HIL mode and in the build option I’ve selected Automatically determine serial port for firmware upload.
When I run through “MONITOR AND TUNE”, it displays this:
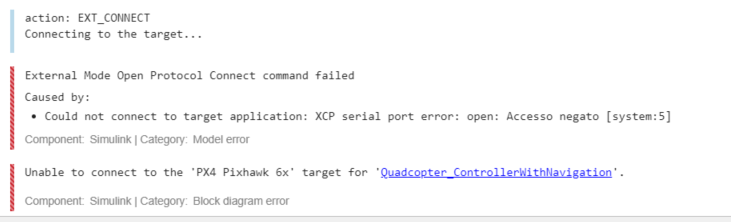
Why do I have this error? Can I use the telemetry radio for external mode ?