Hi,
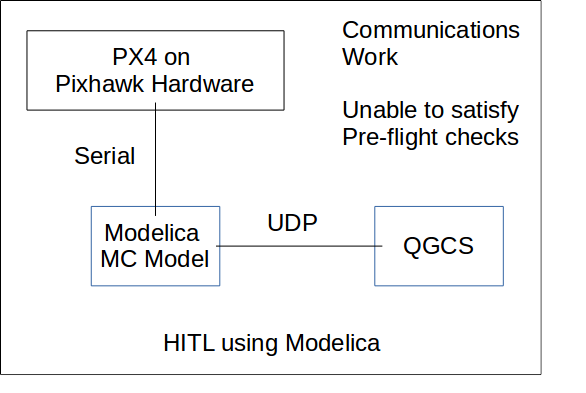
We are building a Multi copter simulator on Modelica. We are following in the HITL Architecture of jMAVSim with Modelica as given below.
Communications between the PX4, Modelics code and QGCS work.
When we send the HIL_SENSOR , HIL_GPS, HIL_STATE_QUTERION values we don’t receive any changes on HIL_ACTUATOR_CONTROLS.
So , are there any conditions/prerequisites to be satisfied for the copter to fly? Are they listed anywhere ?