November 15, 2023
Join us
Agenda
- Community Announcement
- Community Q&A
- General Discussions
Community Announcement
![]() External Flight Modes is now part of main
External Flight Modes is now part of main
https://github.com/PX4/PX4-Autopilot/pull/20707
![]() Pixhawk FMUv6XRT is also now in tree
Pixhawk FMUv6XRT is also now in tree
https://github.com/PX4/PX4-Autopilot/pull/22263
 Community Q&A (No deep technical discussions)
Community Q&A (No deep technical discussions)
 Guideline for asking a Question
Guideline for asking a Question
- Specify what you are trying to achieve
- Specify what environment / platform you are using
- Prepare a Link or Document to help understand if possible
- First, ask the question on Discord or create a Github Issue!
- If you take over 5 minutes for the question, please continue in Discord or a Github Issue.
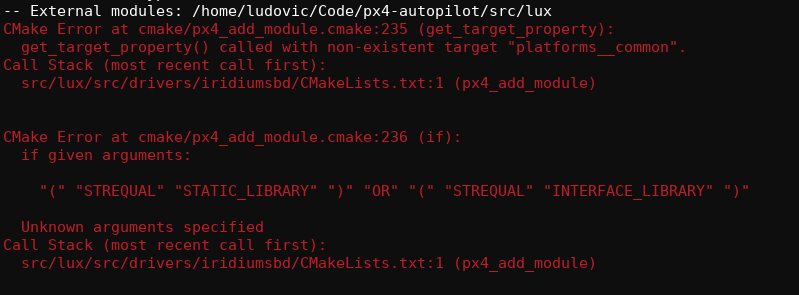
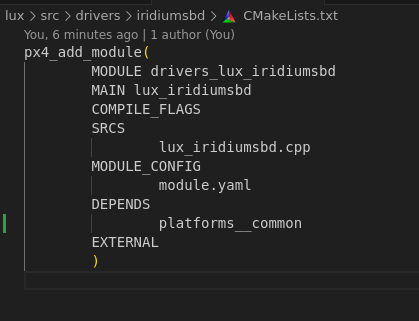
Q1: Why is my external module failing
A1: We should implement a CICD pipeline to make sure that external modules are not broken in the future.
Modules should talk to each other through pub/sub not build off of each other. If you hit a particular problem with mavlink receiver you can lower the priority of the mavlink receiver thread. That would be a straightforward change. Or, you could do round robin scheduling with a time slice in place so that other mavlink instances have a chance to run.
Q2: tools or tips for creating a vehicle in Gazebo
A2: gazebo sim app there is a ton of models: https://app.gazebosim.org/fuel/models, you can take one of those and start to modify it from there. Here is also a really good video tutorial: https://app.gazebosim.org/fuel/models.
Q3: Auto-land for fixed wing
A3: The auto-land for 1.14 stable is broken for terrain follow. It keeps girating up and down. Terrain follow goes from valid to invalid from valid to invalid. It can be recreated in sitl.
Q4: Collision prevention cp_guide_angle does not seem to be working to yaw the vehicle before hitting an object. How can we fix it / should we rip out the logic and add something new
A4: biggest obstacle was that there is nothing in sitl that we can test with nor something easy in real life. Andrew has a branch of this working in sitl. we can utilize that branch for people to work on the collision prevention guide angle logic behind the scenes, and then test on the starling.