rroche
June 14, 2023, 5:00pm
1
Discord is great for playing games and chilling with friends, or even building a worldwide community. Customize your own space to talk, play, and hang out.
Community Announcement
Community Q&A
General Discussions
We have couple of release blockers, after resolved we will have release candidate
If you have a drone to contribute, it would be helpful to get more testings!
Perhaps v1.14 release features showcase event? (release party)
E.g. new actuators setup QGC workflow
Specify what you are trying to achieve
Specify what environment / platform you are using
Prepare a Link or Document to help understand if possible
First, ask the question on Discord or create a Github Issue !
If you take over 5 minutes for the question, please continue in Discord or a Github Issue.
opened 10:51AM - 21 Jun 23 UTC
### Describe the bug
Hi all, I'm trying to run tiltrotor VTOL HITL simulation i… n Gazebo Classic 11. I have connected to QGC and made the necessary modifications to the sdf file (setting serialEnabled to 1 and hilenabled to 1, as well as setting SYS_HITL to 1). QGC was able to connect as well. However, when commanded to take off (autonomous mission) from QGC, the rotors on the model simply rotate slowly and the model doesnt move at all. I have previously done this with standard vtol with no problems.
I compared the flight logs of the previous successful Standard VTOL HITL mission VS the current Tiltrotor VTOL HITL mission and discovered that the motor outputs in the Tiltrotor is only 0.1 VS 0.5 in the Standard VTOL. I think this is the cause as to why the rotors turn very slowly in the tiltrotor simulation, but I can't figure out why this is happening since I did not change airframe parameters except for VT_TYPE and MAV_TYPE.
Can someone please point to where the problem could lie? Thank you very much!
### To Reproduce
1. Edit tiltrotor sdf file in models folder: in the mavlink plugin set serialenabled to 1, serialDevice to (usb port), hilenabled to 1
2. Open QGroundControl, in application settings listen only to UDP, in vehicle settings set safety setting to HIL mode, then close QGroundControl again
3. Create new world file in worlds folder, include tiltrotor model
4. In terminal, run:
> cd PX4-Autopilot
> DONT_RUN=1 make px4_sitl_default gazebo-classic
> source Tools/simulation/gazebo/setup_gazebo.bash $(pwd)
> gazebo Tools/simulation/gazebo/sitl_gazebo/worlds/hitl_
5. Launch QGroundControl, plan mission and takeoff
### Expected behavior
Rotors spin up fast and model takes off
### Screenshot / Media
Tiltrotor VTOL Motor Outputs on the Left vs Standard VTOL Motor Outputs on the Right

### Flight Log
```txt
Tiltrotor VTOL Flight Log:
https://review.px4.io/plot_app?log=d5ead83a-4169-41b1-9c76-c22ff2fd567a
Standard VTOL Flight Log:
https://review.px4.io/plot_app?log=1fac9d43-6548-47c3-b75a-d94e8a098f52
```
### Software Version
```txt
HW arch: PX4_FMU_V5
HW type: V5004000
HW version: 0x004
HW revision: 0x000
PX4 git-hash: 70178b66d8f4bc18e74941821217b1ac8e5850b6
PX4 version: 1.14.0 0 (17694720)
PX4 git-branch: main
OS: NuttX
OS version: Release 11.0.0 (184549631)
OS git-hash: 3f77354c0dc88793a47ff3b57595195ab45f7ba9
Build datetime: Jun 21 2023 16:01:34
Build uri: localhost
Build variant: default
Toolchain: GNU GCC, 9.3.1 20200408 (release)
PX4GUID: 000200000000303236323039510b003d003a
MCU: STM32F76xxx, rev. Z
Simulator: Gazebo Classic 11
```
### Flight controller
Pixhawk 4 Mini
### Vehicle type
Hybrid VTOL
### How are the different components wired up (including port information)
_No response_
### Additional context
_No response_
Works in SITL, but in HITL the motor ouptut is too low for some reason
Standard VTOL works fine in HITL, but tiltrotor isn’t.
Feedback
MAVLink interface for HITL is quite jenky. Why is HITL necessary?
To debug, first debug what the output of actuator goes through for mavlink ↔ sitl gazebo. Then, check what’s the pipeline for HITL for motor outputs
Check: Control allocator setup / simulator_mavlink for SITL and mavlink module for HITL
Make sure to figure out how the tiltrotor VTOL SITL is working fine, and where HITL differs from SITL for that.
Flight log: Flight Review
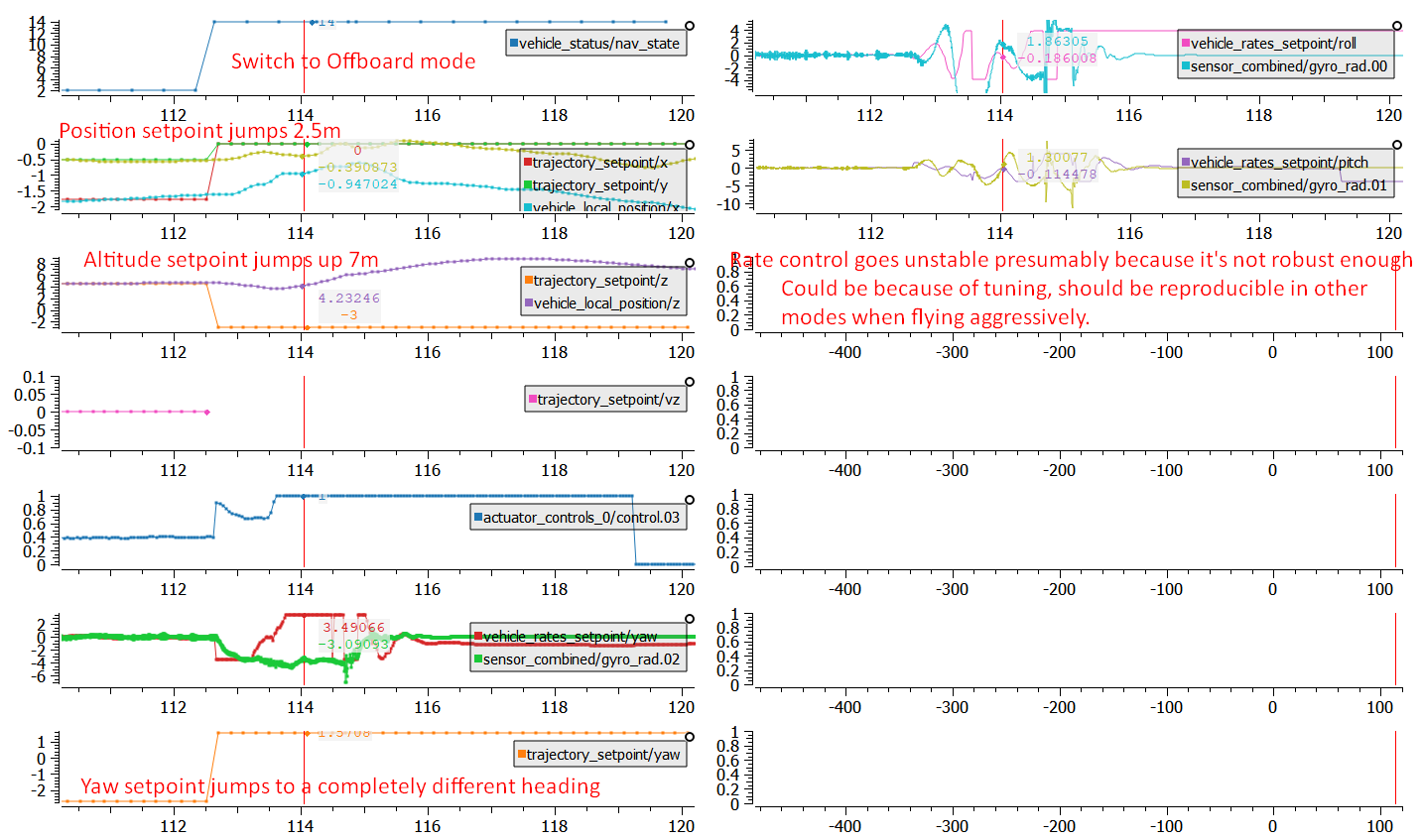
Our drone was accepting mavros commands for arming, takeoff, etc but when I set the mode to offboard the drone immediately flipped and started behaving in an unstable way. I was publishing local position z value before I switched to offboard mode. We are using our quad with pixhawk 6x fc and px4.
Offboard setpoint is local position message
Have tried takeoff and landing, and works
Another log: Flight Review
Feedback
When the motor directions were all switched, as soon as yaw control is induced, it may cause a flip. So check motor directions! - Mark
Perhaps the position setpoint was too aggressive, and maybe current offboard control can’t handle that - Daniel
Try out manual mode and apply aggressive inputs, and make sure vehicle can track the attitude/rate well. Issue may be from rate controller.
Analysis from Matthias:
Try to find the rate control issue in Stabilized/Manual mode by flying aggressively. If found try to tune such that it does not get unstable in this case.
When switching to offboard initialize the setpoint with the current vehicle state and then start moving it gently when you were able to take over.
Is there any work being done to update QGC Herelink Radio telemetry . I am currently on a Beta 1 update version and things are not working as required with the CUBE Orange
Herelink has their own fork based on 5.12 Qt, but it’s likely very outdated
Ramon also pinged cubepilot team, will get back with answer
main ← slgrobotics:RTK-HPPOSLLH
opened 04:17PM - 04 Jun 23 UTC
This PR seeks to match [https://github.com/PX4/PX4-GPSDrivers/pull/136](https://… github.com/PX4/PX4-GPSDrivers/pull/136) - adding high precision RTK lat/lon/alt components from MSG_NAV_HPPOSLLH
### Solved Problem
This creates a possibility to operate coordinates with precision necessary to drive land based Rovers, for example, agricultural machines.
### Solution
please follow the link above for details
### Note:
once 1e-9 precision is available in _gps_position ORB message, it can be used in the following modules, as far as I know:
- EKF2
- GPS Blending
For my Rover project, I modified RoverPositionControl.cpp to subscribe to ORB_ID(sensor_gps) and use precise lat/lon for course planning. This won't be necessary if EKF2 could deliver centimeter level precision coordinates.
For lawnmower application
int data type for altitude limits precision to around 10 centimeters!
Suggestions from SLG robotics:
Rename lattitude to lat_deg, to make search through code better and make unit more explicit
Feedback:
If we change the data type, let’s change the naming as well, to always catch these migration cases in e.g. Flight Review
Change altitude members into float (achieve 0.1m precision), and rename to append unit
Currently in internal development with Ascend Engineering. Is it useful for PX4 in general?
 Community Announcement
Community Announcement Community Q&A (No deep technical discussions)
Community Q&A (No deep technical discussions) Guideline for asking a Question
Guideline for asking a Question
 General Discussions
General Discussions