hi guys!
i have a cheesron cx-20 vehicle and px4 autopilot and wanna to connect them.
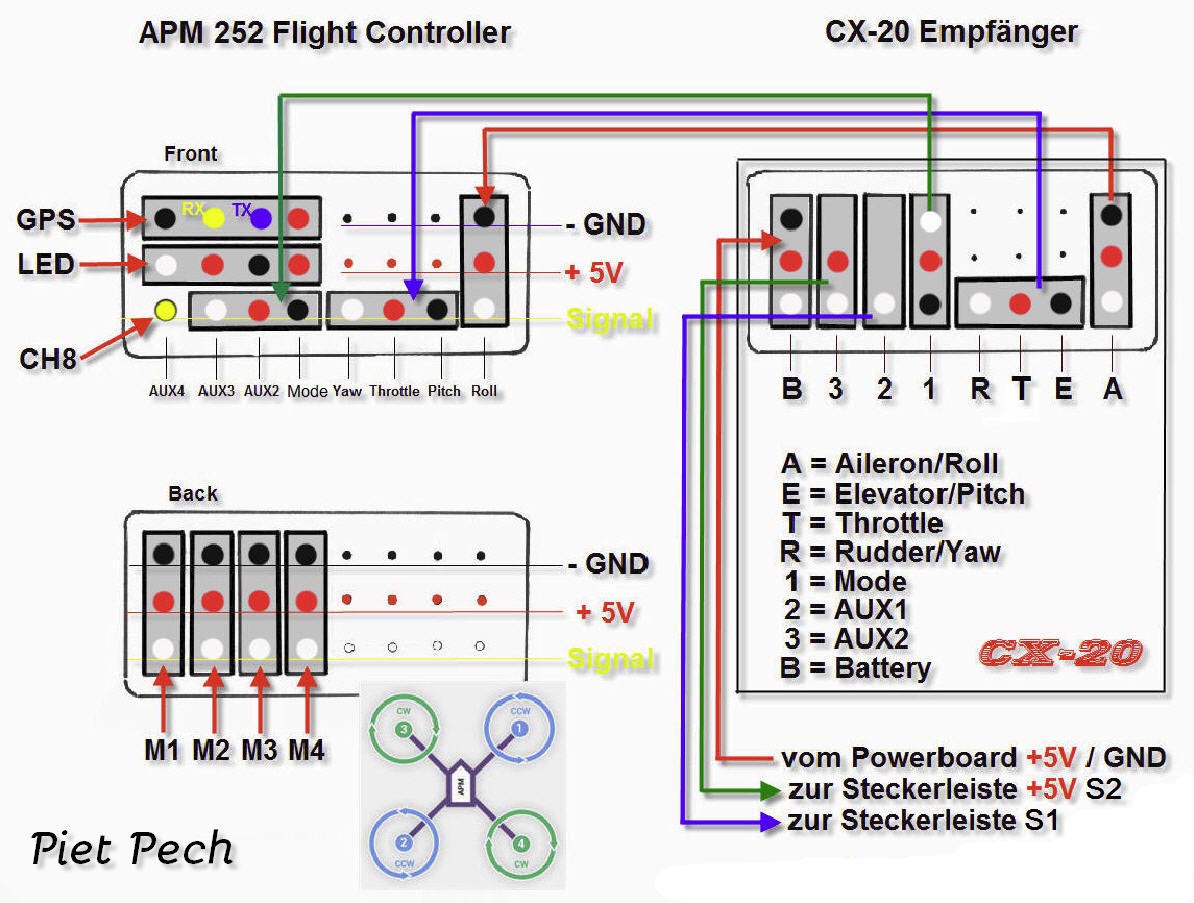
my vehicle has a built-in APM252 autopilot. i tried to replace it by px4. So i found connection scheme and connect to px4 as follows:
{kind=link}
M1 input from motor 1 to Main1 output
M2 to Main2
M3 to Main3
M4 to Main4
after that i’ve connect px4 to PC and open QGC. After calibrating i could arm the vehicle. But i couldn’t to do takeoff it - got “takeoff command temporary denied” message from px4. What i forgot to do?