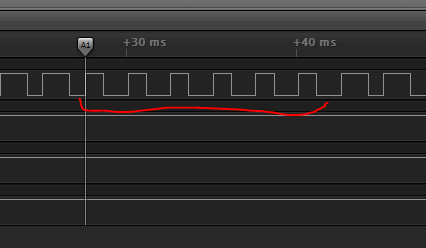
we are running a standard 3DR DIY quad configuration with 3DR Pixhawk. When we rotate the motors, cracking can be heard and it increases with motor speed. We investigated the problem and discovered that every 230 ms, there are a few PWM pulses with the length of 1000 us, as can be seen in the picture. The Saleae Logic captured data is also available.
I can’t reproduce this on a 3DR Pixhawk using v1.4.4 or master. Logic analyzer and digital scope show no glitches at all. Also, I’ve never observed this in flight. Have you made any changes to the firmware or customized the startup?
We haven’t made any changes to the firmware or customised the startup - all stock configuration. We only optimised the attitude stabilisation control parameter values.
On firmware version 1.3 the error is not present, on 1.4 it is. We also ran the firmware on our second Pixhawk hardware and the problem is the same. Otherwise, Board ID is 9.
I doubt that any likely hardware revisions could cause the behavior you’re observing and I don’t think there were any significant revisions to the Pixhawk schematic during production.
Try disconnecting everything but the safety switch and see if the PWM outputs are still flaky.
Even without any peripheral components the outputs are still flaky. It’s interesting that with the 1.3 version everything is OK, but with the 1.4 the outputs become corrupted. To be clear, flaky outputs are only observed when the output PWM pulse width is greater than 1000us.
Thank you, that was it! If you disable the Virtual Joystick the problem is gone. Is the Virtual Joystick enabled by default in QGroundControl? I can’t remember setting it up. Thank you once more!