Hi,
I bought a Holybro X500 kit with Pixhawk4. I assembled all according to the guide https://docs.px4.io/master/en/config/, but the motors do not work. I tested the motors with direct wiring with Radiolink receiver R9DS and they properly run, but when I connect the ESC input to the board PM07 there are not responses.
I verified that all the wire connection are correct, I connected Radiolink R9DS to Pixhawk4 in S.BUS mode.
Moreover also in QGC there are a couple of inconsistencies:
When try to run the motor test nothing happens, there are no error messages but still the motor not work;
When the Holybro is armed the QGC reports flying even if the motors are not working.
hello can you send picture of the installation…did you connect the esc signal wire at aux or at the power board esc signal point ???
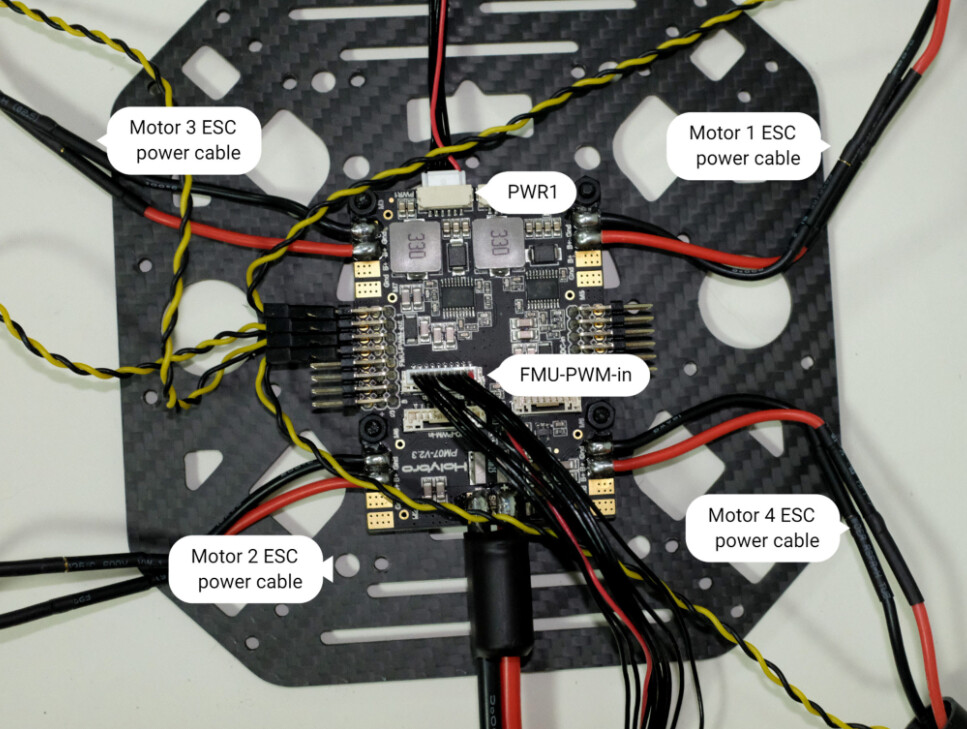
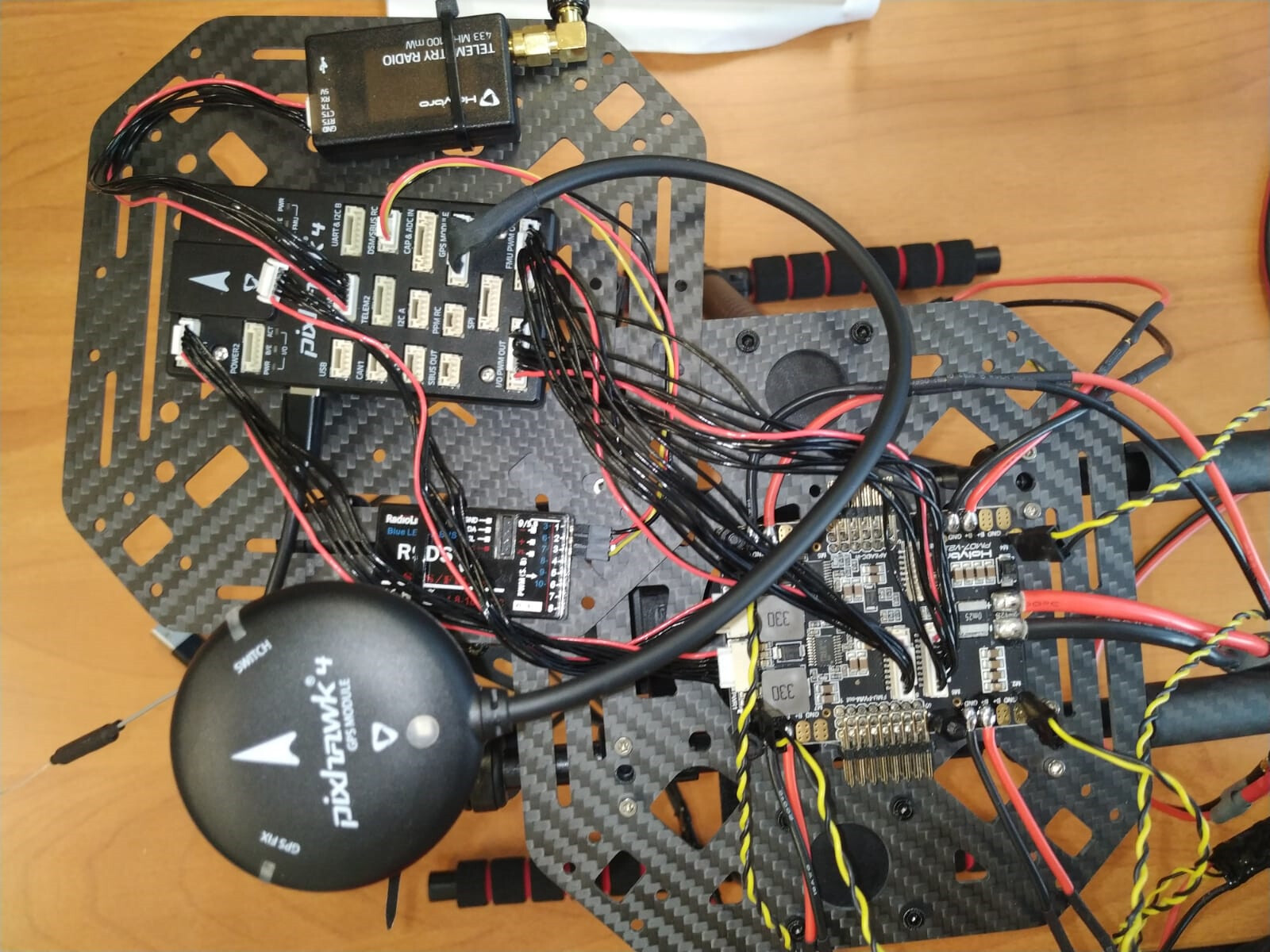
Picture of the wiring connection for esc to pixhawk power board
When try to run the motor test nothing happens, there are no error messages but still the motor not work;
1.1 This because you connect the esc signal wire at wrong point
When the Holybro is armed the QGC reports flying even if the motors are not working.
2.2 It report flying because its armed but your esc signal wire is at wrong terminal
Send the picture of your esc signal wire connection…
I tried to connect the ESC signal (yellow wire) to the 4 I/O PWM OUTS, as in the picture below, and the motors work. Is it necessary to connect also the ground of the ESC to the PM07 board?
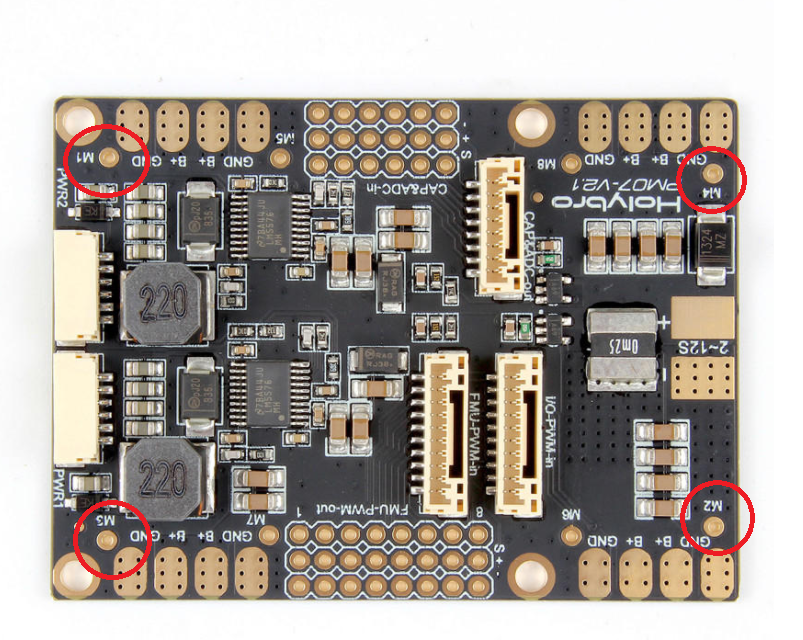
I biught the same kit from Holybro, screwed up connection of ESC to power PM07, then contacted Holybro and got this enclosed image. This will help you.
Can yours arm the motor without doing any extra setting???..what is the diffirent of connecting at PM07 cable to I/O PWM input terminal to pixhawk 4 I/O output terminal than connect the esc signal wire to PM07 I/O output terminal …it looks like you are new kids here !!!