Dear All,
I have attempted to develop my own mixer on x-quad configuration.
My main objective to get every thruster PWM value and split it to 3 other outputs (12 in total) via control module.
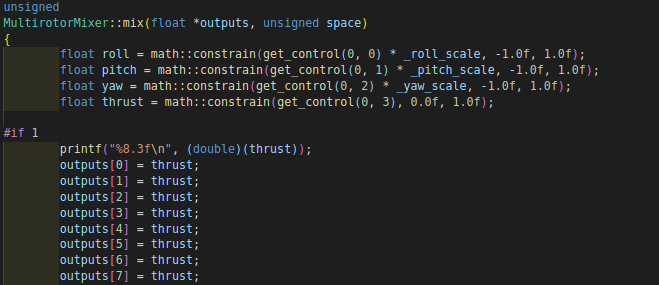
Initially, I wrote this snippet in mixer_multirotor.cpp as follows to see the final output, where I gave all the actuator the thrust signal as it is.
When I tried it on PX4 using servos, the result was as the following chart.
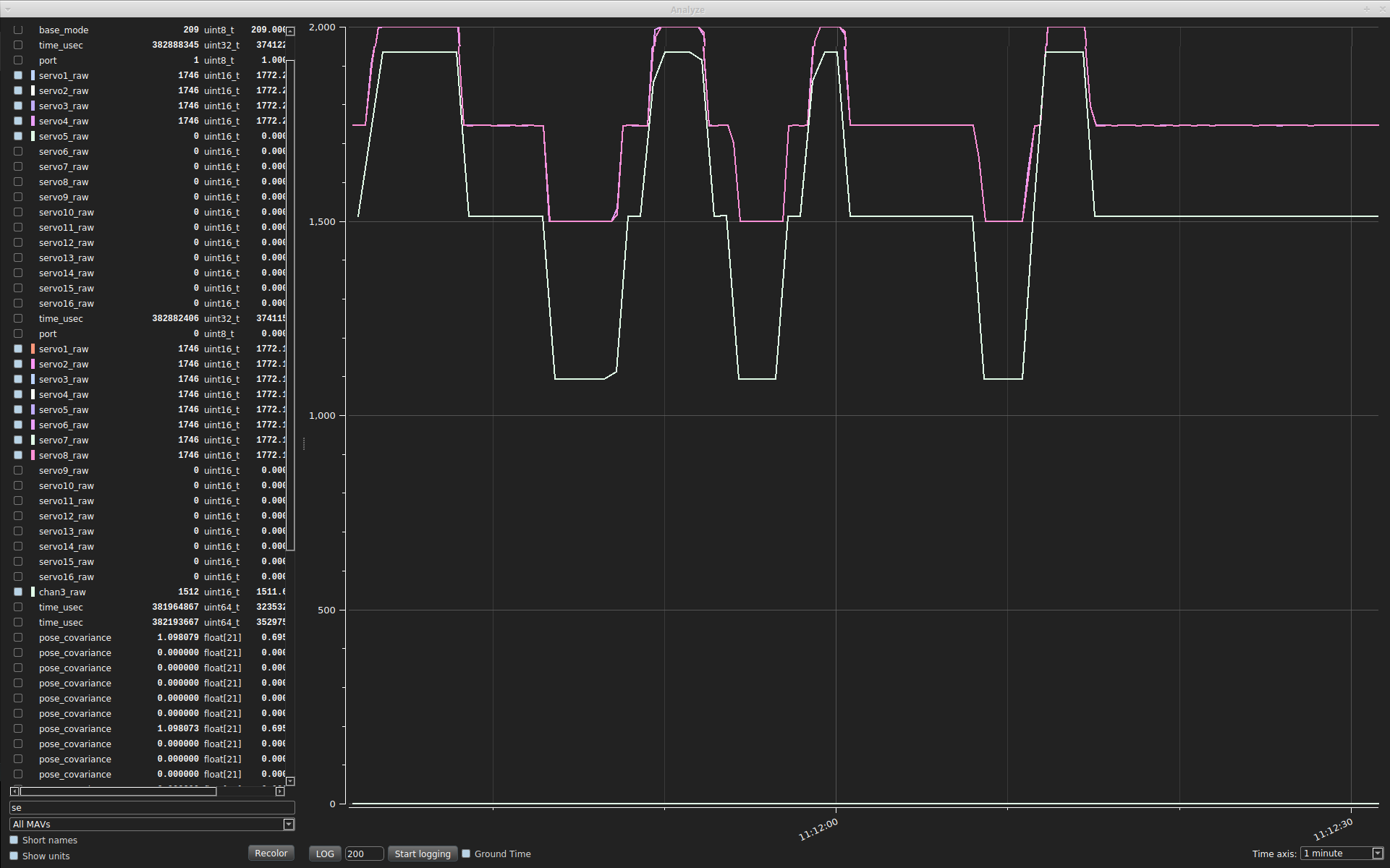
What is the modification I need to do to have the same value as the thrust value, or whatever the PWM value I give to the thrusters to control it?
(I tried to track the output value but I got lost and confused between PWM_LIMIT_CALC , EFFECTIVE_PWM, and other definitions)
Any help?
P.s. it is my first attempt to develop the code.