We are having issues getting a test flight setup for the PosHold (Position Hold) and Loiter modes. We are using Optical Flow [OpenMV] & Lidar (Without GPS). We have tried troubleshooting using other forum posts/wiki but could not find anything.
We have tried setting our origin (Set EKF Origin Here) and that didn’t work either. Arming in AltHold works, just can’t get PosHold or Loiter to work.
Do you get valid flow data and does the EKF consume the flow data? Does it work when you hold it e.g. 1m above ground (without arming)?
Let me ping @bresch, he might have some better tips.
We do get valid flow data (as in opt_m_x and opt_m_y values). Holding it 1m off the ground does give us values (although a little skewed which might be something we look into).
Can you arm (without props first) 1m above the ground, or is there still something missing? I’m not saying that’s a solution, I’m just wondering where the problem is.
We can arm in other modes 1m off the ground (have tested with alt hold mode) but we haven’t had the chance to retest for Poshold or loiter, will get back to you once we get that done
1 Like
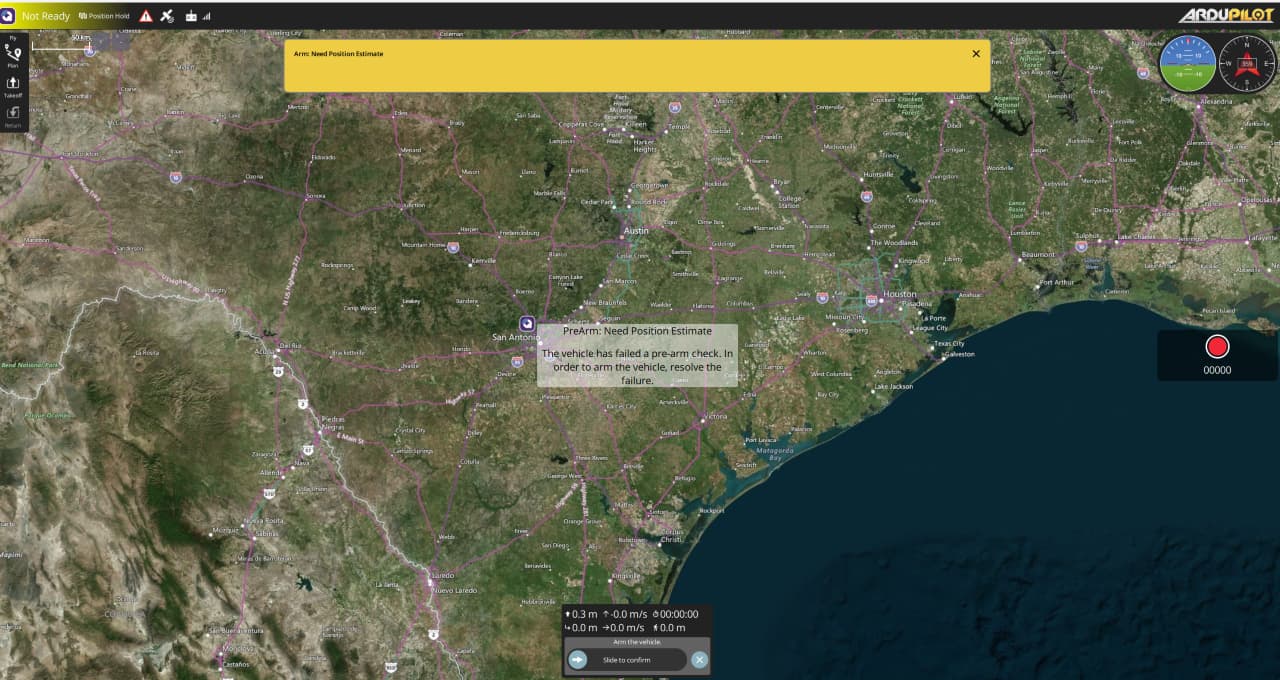
Update: We tested arming 1m above the ground, still did not work (Gave same error), not sure what’s wrong at this point.
Hi @malikfarooq ,
looking at your screenshot, you’re actually using Ardupilot. This is a forum for PX4 users, we can’t really help you. You’ll be able to get more help if you ask on their forum (or switch to PX4 if you want).
We tried through there but haven’t received a response yet; although it looks like whatever the issue is might be with the Optical Flow sensor itself, but thank you!