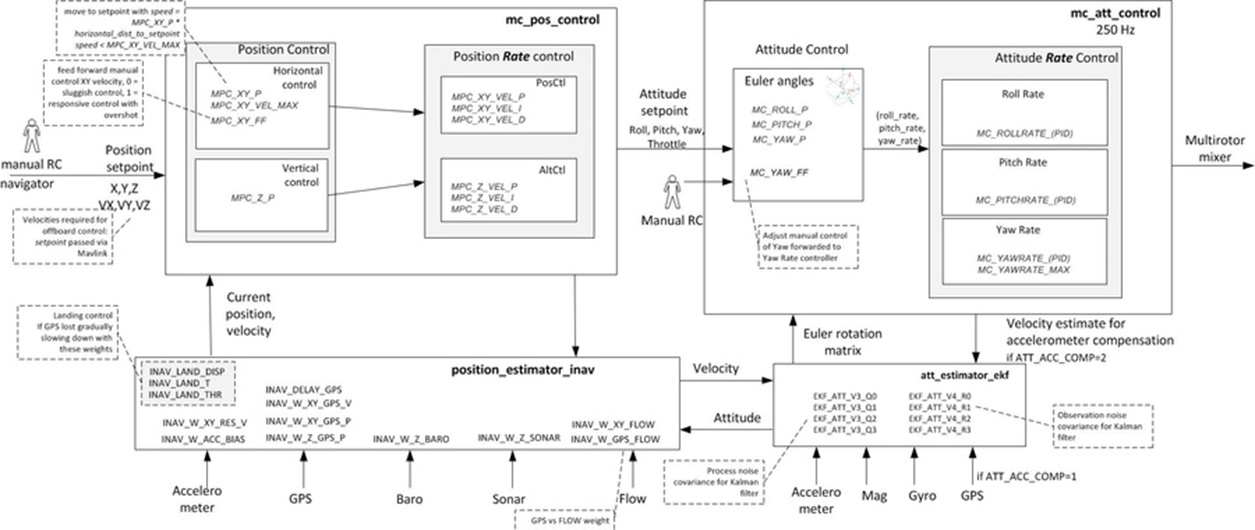
The final goal is to come up with a diagram like this one, but with LPE and Q-estimator.
Related topics
| Topic | Replies | Views | Activity | |
|---|---|---|---|---|
| How mixer work | 13 | 8314 | August 5, 2020 | |
| PX4: dynamic control need for a drone | 27 | 4355 | January 19, 2025 | |
|
How are pwm values set after controllers outputs are calculated for quadrotors?
|
18 | 6452 | October 16, 2020 | |
| Fixed-wing Attitude Controller for VTOL Aircraft | 16 | 2752 | June 28, 2021 | |
| Control Allocation Matrix and Thrust Output | 13 | 2758 | March 24, 2020 |