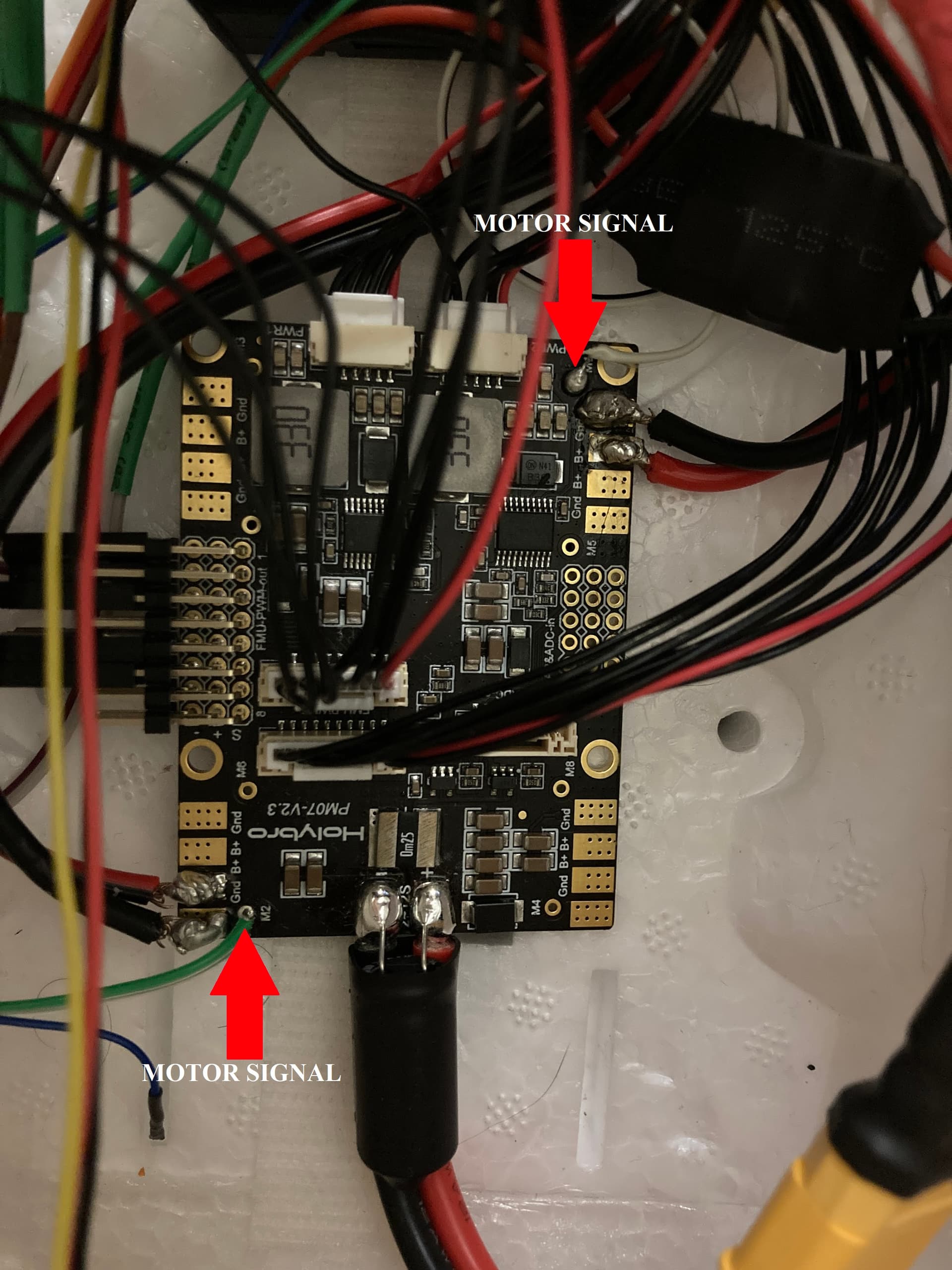
I have a Pixhawk 6C connected to a PM07 power module. I am trying to add autopilot to a fixed-wing standard airplane. I calibrated my Taranis X9D transmitter with QGC but when I arm the vehicle my brushless outrunner motors are throttled by the aileron (roll, CH4) channel and the aileron servos are actuated by the throttle (CH1) channel. The documentation does not mention a specific channel order that the sticks have to output. I assume that the correlation is completed by calibration. I would like for my throttle stick (CH1) to send PWM signals to the motor ESCs. Please offer advise. I can provide more information.
Hi, I’m not sure I understood your issue: you calibrated your radio with QGC and it went fine such that when you move any stick on the RC you see the right input captured by QGC, i.e. if you move the throttle stick the throttle gauge change.
But, this command is sent to the wrong output: the aileron servos. And at the same time the aileron commands are sent to the brushless outrunner motors?
Can you please be more specific on what I should try—to fix the issue? Also the documentation does not list the corresponding output channels for a standard plane
How does the PX4 execute roll maneuvers in position mode? (I also use return, hold, and land modes) Will the flight controller be able to lower the aileron on the opposite side and raise the aileron on the rolling side with a Y harness to execute roll maneuvers? Is differential roll something that I can implement on my Taranis X9D transmitter?
Yes, it would be just like any traditional airplane setup with a single PWM port from the Rx without an FC. You just need to check and confirm the AIL are moving the correct way.
I would setup differential mechanically so it performs the same way during an auto mission.