Hi,
I am a beginner with px4 and I am trying to connect a companion computer (my laptop for testing purposes) to a pixhawk 4 TELEM2 port.
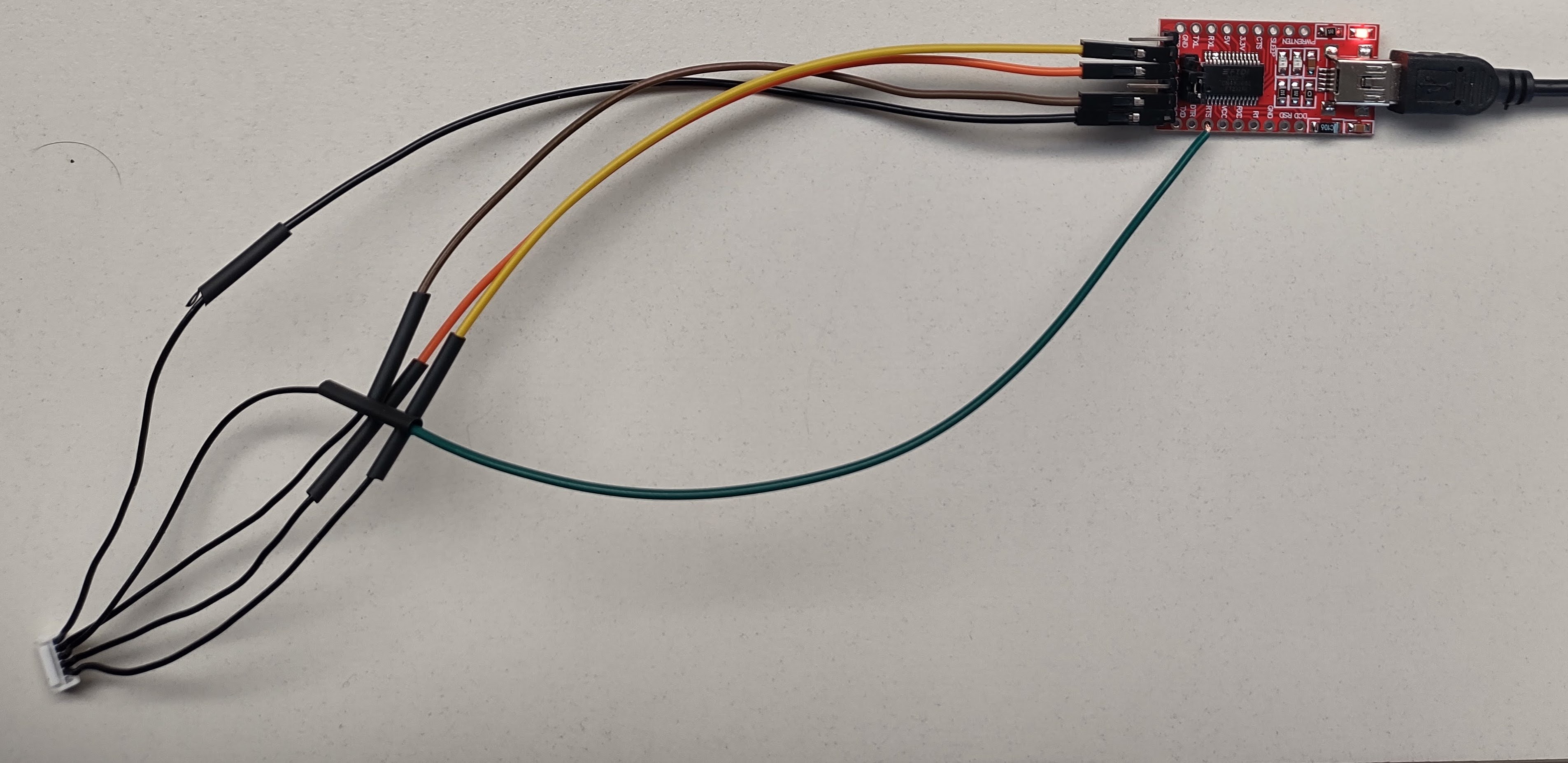
I was following the manual using a FTDI with a JST connector (cutting the 5V wire) but I cannot get a heartbeat on /dev/ttyUSB0 using the testscript https://github.com/mavlink/c_uart_interface_example QGroundControl also fails to connect with disconnected link "serial" as it contained no MAVLink data.
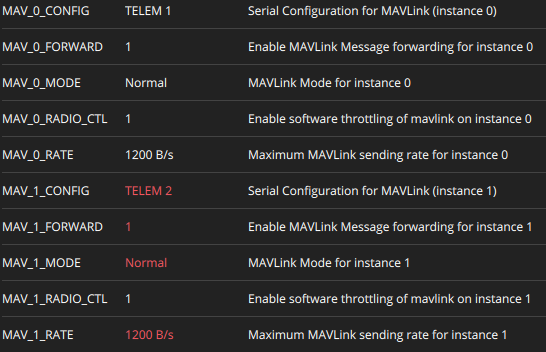
When I run screen /dev/ttyUSB0 I see something happening but I can’t figure if I wired something wrong or if I did the configuration wrong. I used the table from the config.
I set the configs for MAV_1 same as for MAV_0 but I tried different configurations as well.
When I print mavlink status over the working telemetry radio connection I get the following output:
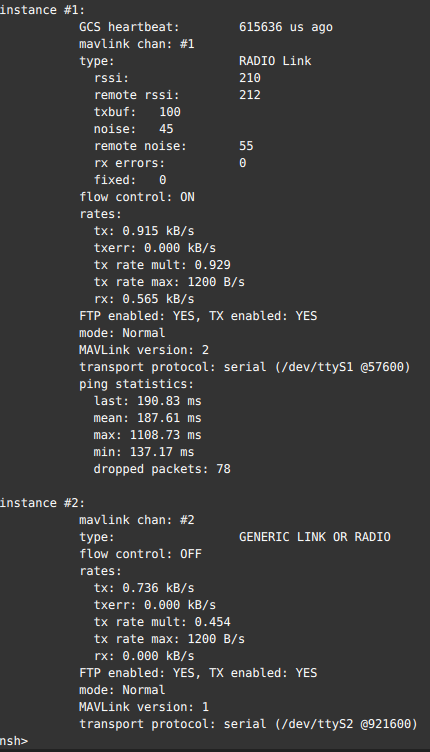
I think instance #2 must be my serial connection and there is a rate on tx but none on rx so maybe this is wrong? I have a instance #0 as well so apparently they don’t match with the instances of the MAV_X_ settings…
Does anyone see what’s wrong in this setup? Any help would be greatly appreciated!