Hey,
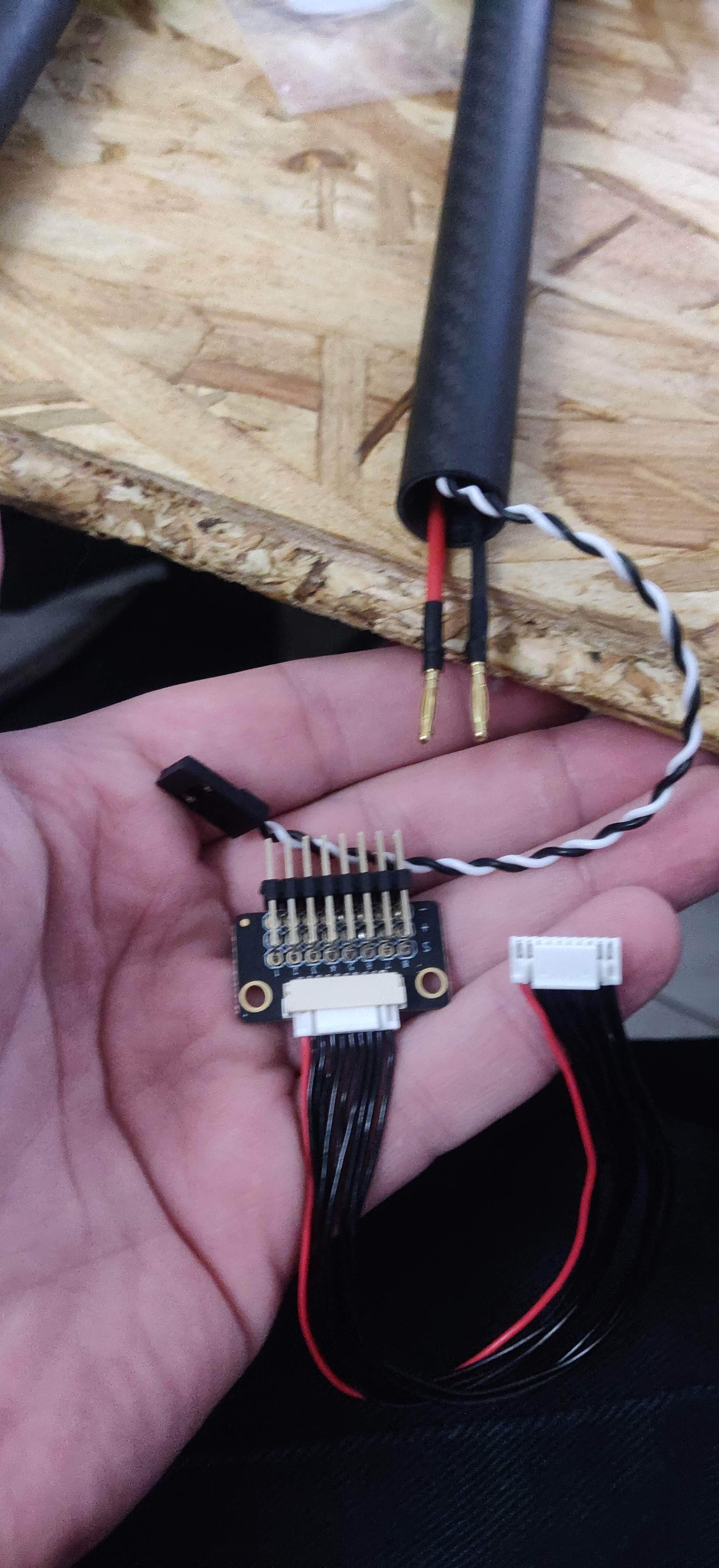
I’m in the same situation as the original poster. The kit I got from holybro is said to be “solder-less”, so the wires that comes out of the ESC have a little connector (the square one of this photo):

Do I really need to cut this connector and solder the white cable to M1, M2, M3, and M4?
Or can I plug them directly on the pixhawk 4 (and use only the PM board for alimentation?)
Or maybe I can use the angled connector on the bottom picture?
Thanks,
Rev