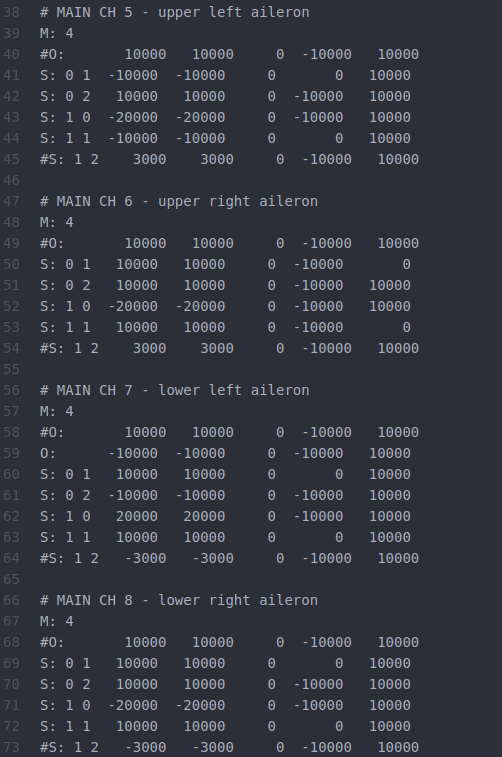
I am working on a drone with Pixhawk 2. I would like to command 8 control surfaces (rudders and elevons) through the 8 main PWM outputs. The 8 servos commanding control surfaces are implemented in a mixer file.
However, I have only the 7 first PWM outputs working. The 8th one does not send any PWM signal.
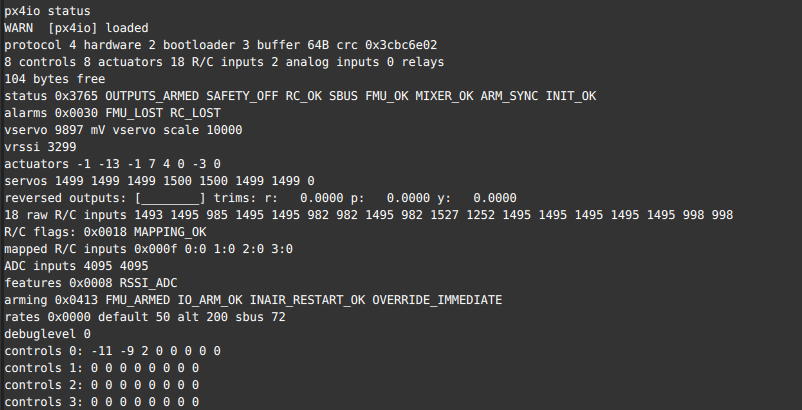
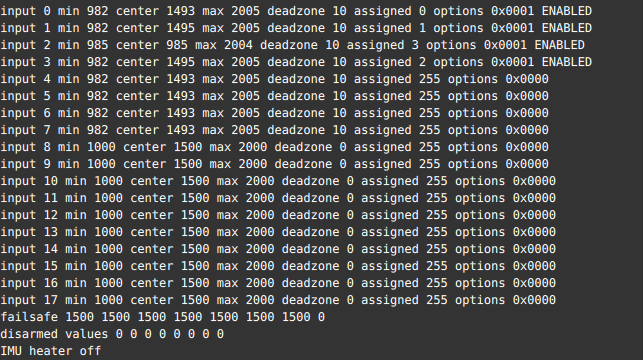
If I write “listener actuator_outputs” in MAVLINK terminal, I get this :
I think it can be a problem with the IO buffer. I tried to change PX4IO_MAX_MIXER_LENGTH (in src/drivers/modules/px4iofirmware) but it does not make the 8th output work.
Yes I have a newline at the end but I can’t get rid of it. If I remove it, it reappears when I save the mixer with (Ctrl + S).
I have also noticed that if I set a too low value for PX4IO_MAX_MIXER_LENGTH, some other PWM outputs are disabled. But even if I increase it, the 8th output never works.
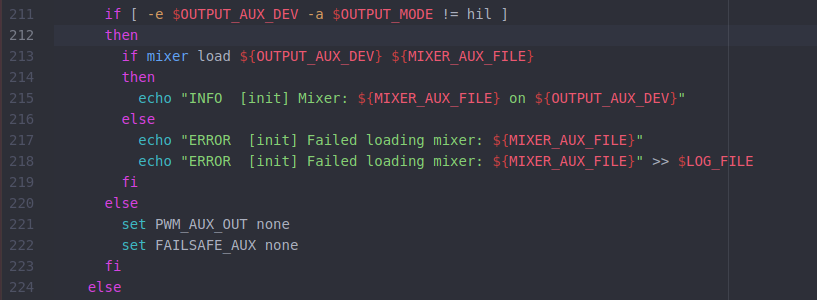
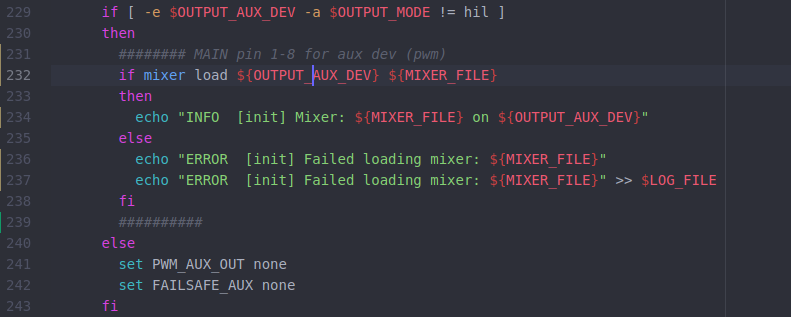
As I have a Pixhawk 2, there were not enough aux PWM outputs so I also modified rc.interface to invert main and aux outputs. The result is that the main mixer is on IO and the aux is on FMU.
FMU controls the motors via UAVCAN and IO controls servos via main PWM outputs.
The way to share code or a changes is using text or text files or diff files. Screenshots are hard to deal with.
If you can create a minimal diff which would allow me to reproduce it on a Pixhawh (without uavcan and whatever other changes you did) then I can try this, otherwise it would take me way too long, sorry.
hi, i had a problem in building dodeca cox which use both output main and aux. the main output runs perfectly but i didn’t get anyting from the fmu pwm out.