Hello Everyone,
I have been having some interesting issues with the Pixhawk 1 autopilot controller version 2.4.8.
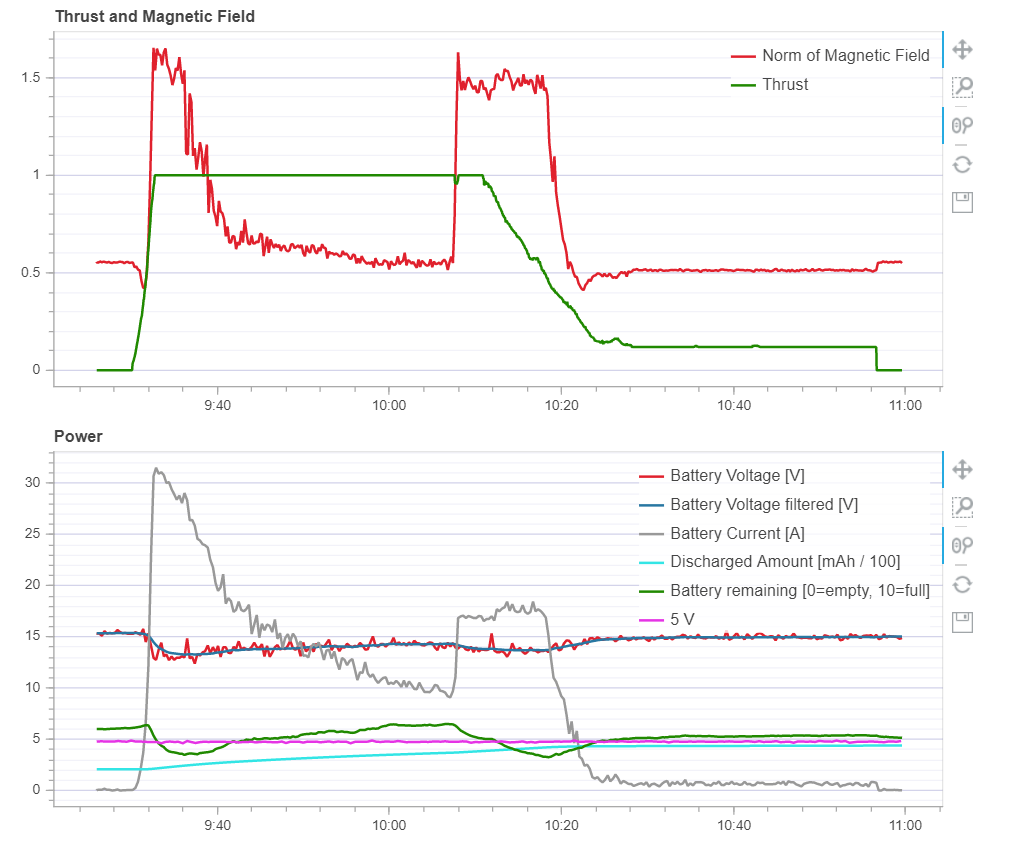
I ran some tests, where I had a quadrotor drone strapped down to the ground by nylon straps held down with 50lb sandbags on each side.
I had mounted the propellers to motors because I wanted to generate a strong magnetic field and with no propellers the current draw is very low.
The tests went as follows,
Zero to Max Throttle, hold for approx 30secs,
Max to 12% Throttle (low idle), hold for approx 30secs
and then disarm.
Plug USB boot QGC and changed software version from 1.11.3 to 1.12.3 (see attached images)
The drone never moved physical position and remained strapped down at the same location without moving during these two tests, software version was changed with a direct USB connection using QGroundControl Desktop version.
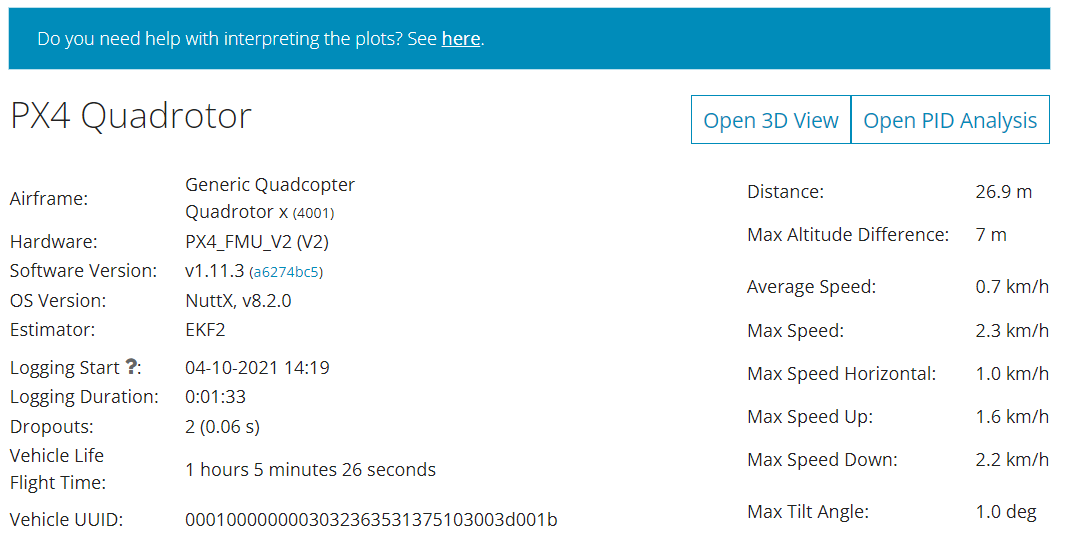
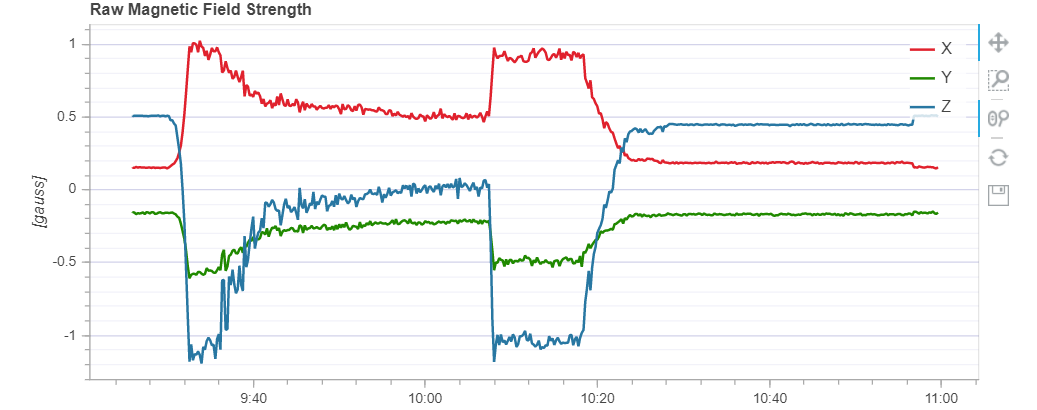
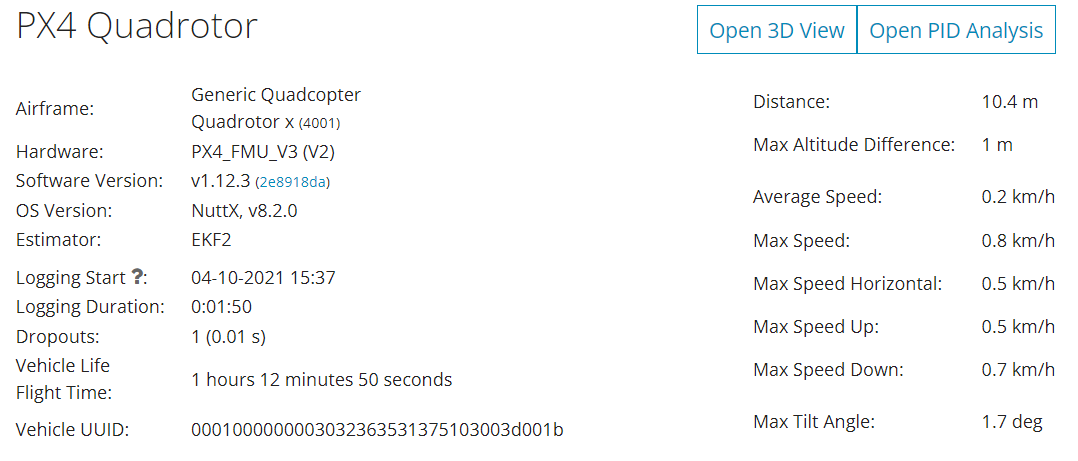
Here are the PX4 Log Analysis screenshots
Version: 1.11.3
Version: 1.12.3
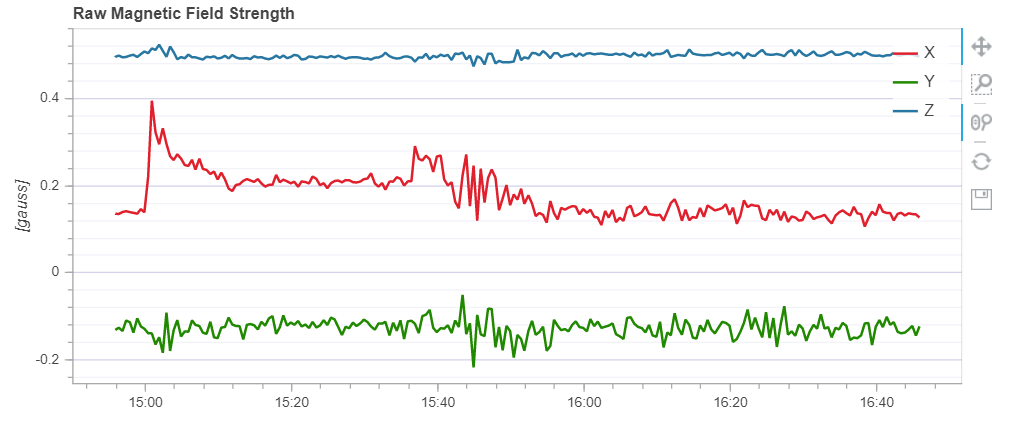
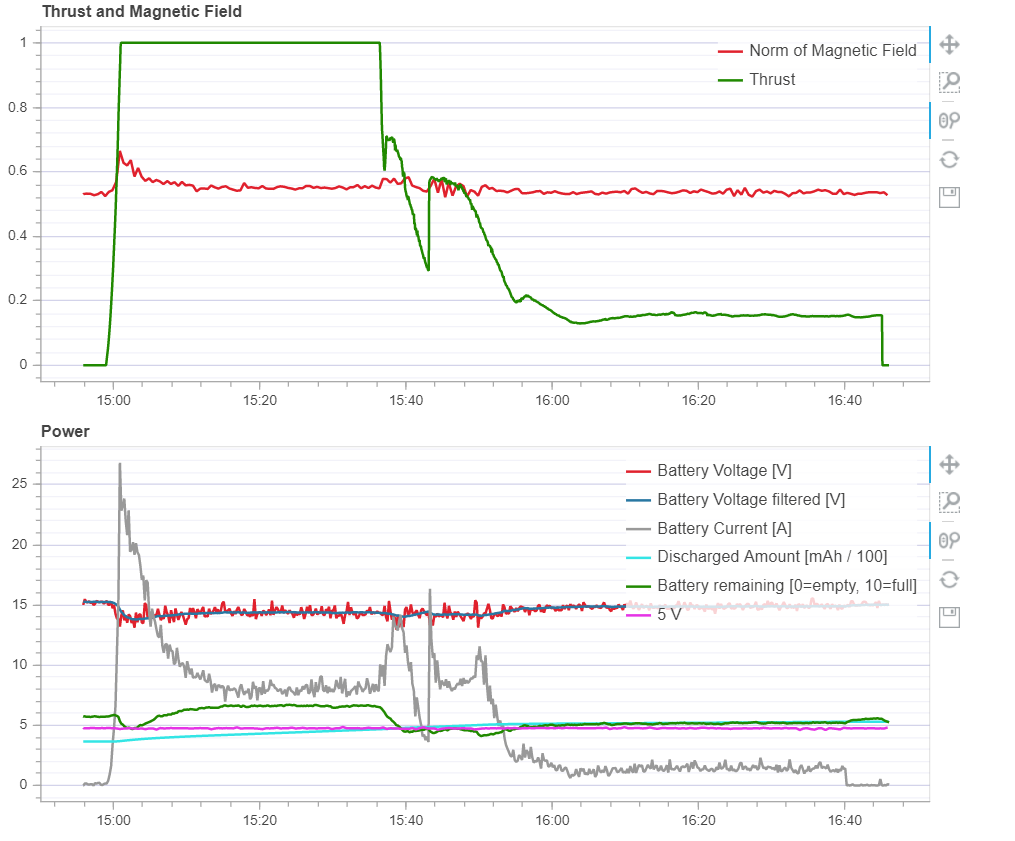
The question I have is why are the magnetic reading changing between software versions? It’s the same exact hardware (drone frame, electronics, Pixhawk) but the reading are very different. Why?