I just finished building my first Pixhawk quadcopter and I’m having some stability issues. Whenever I try to increase the throttle it seems like the rear motors are lifting more than the front motors and so the drone sort of scrapes forwards along the ground for a while before it manages to hover a few feet off the ground but it’s incredibly unstable and moves randomly while doing so and usually crashes shortly after. Furthermore, it seems like increasing the throttle mostly amplifies the instability and doesn’t really change the altitude past a few feet. I have these motors and this frame and this battery . Also my props are the ones that came with the motors, I think they’re 1045’s. I’ve checked the motor orientation/directions(top right is 1, bottom left is 2, top left is 3, and bottom right is 4), with 1 and 2 ccw and 3 and 4 cw. I’ve also checked the prop direction as well. The center of gravity seems to be right in the middle of the drone. I did all the mandatory hardware calibrations in mission planner including my escs (I really thought that was gonna be the problem but it persisted even after I calibrated them). Here are some log files from a small flight I tried to do. Log 1 and Log 2 Does anyone have any ideas why it’s being so unstable? Also if you guys need any pictures or any other info about my setup, please ask.
PX4 does not work with mission planner - are you sure you are running PX4? Please make sure to install PX4 first: https://docs.px4.io/master/en/config/firmware.html
From the log files he’s using ArduPilot firmware, so could ask for help at discuss.ardupilot.org if he wants to stick with Missionplanner.
As others have mentioned, this is a forum for a different kind of firmware than the one you have installed. That said, my thoughts:
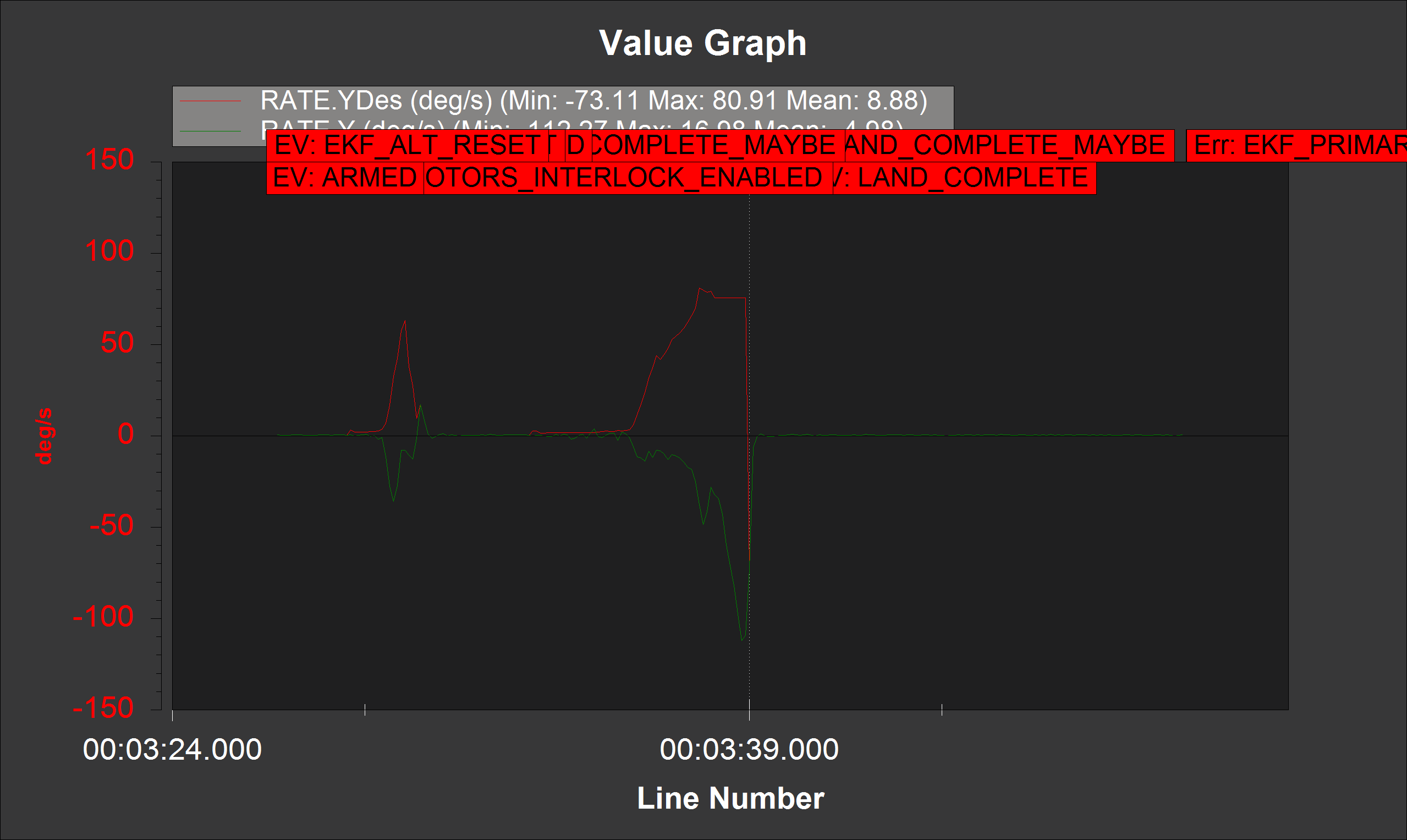
Did you get off the ground in the first flight? The actual yaw rate is reversed from the desired yaw rate, even when it ramps up to maximum.
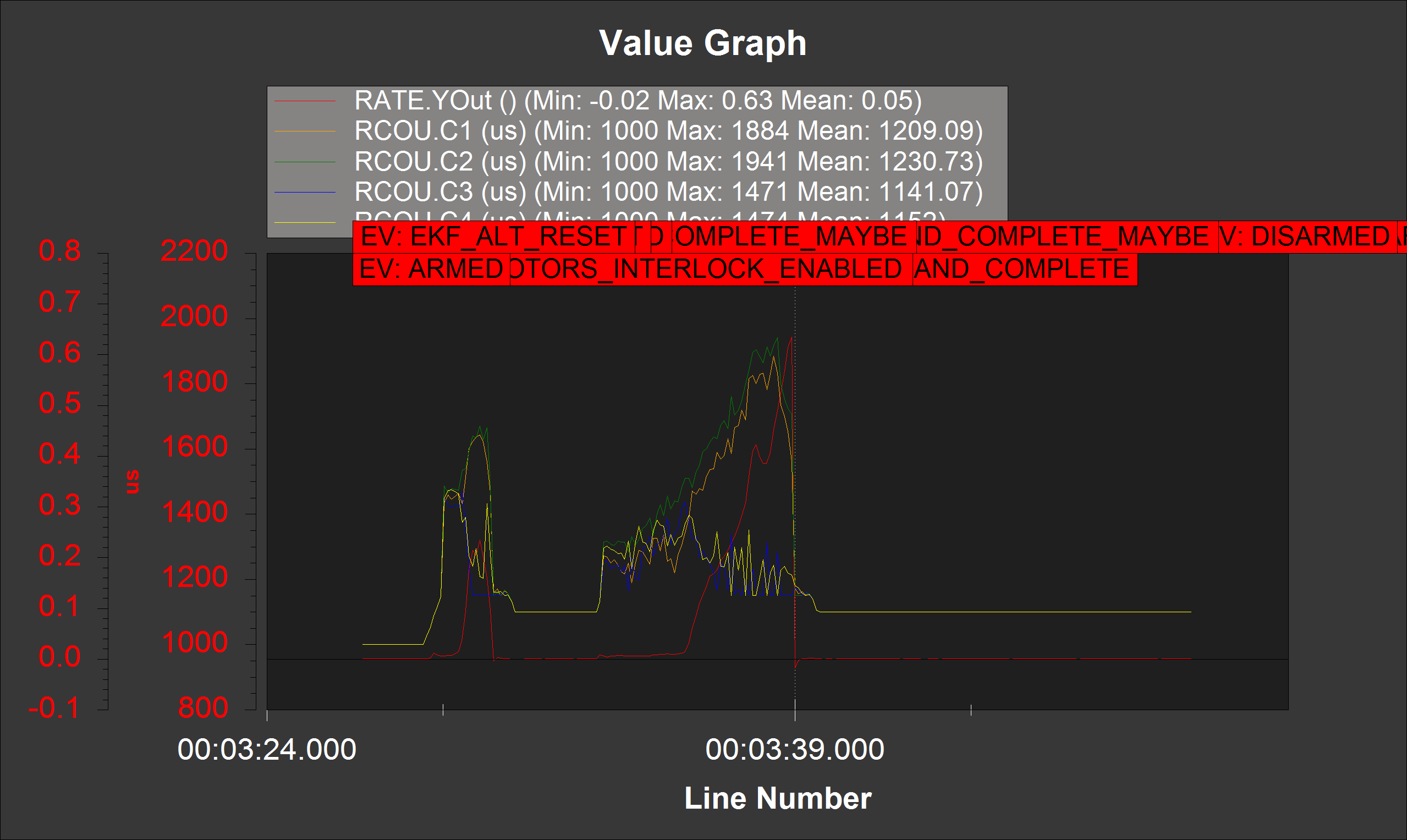
The yaw effort and motor PWM outputs are in line with the yaw effort, so it was trying as hard as it could to yaw the other way.