Airspeed Scaling
Actually, I often noticed that vehicle was wobbling after “few seconds of flight after takeoff”, and after close examination of the log, I found that most likely it is suffering from PID not being scaled with respect to the airspeed.
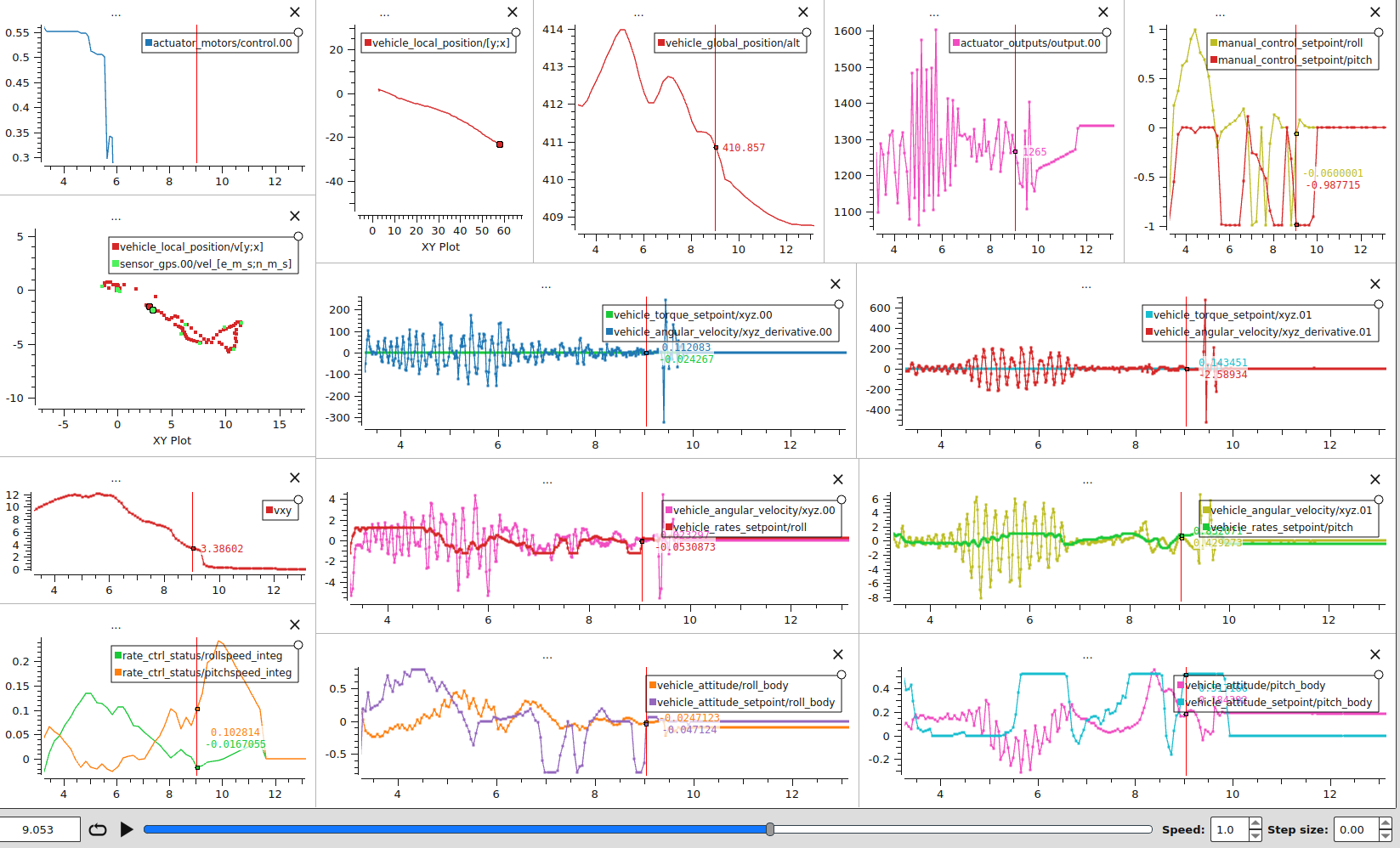
Log link: Flight Review
As I plotted vxy (ground speed) here, you can clearly tell that as the vehicle crosses around 6 m/s mark (as I remove the throttle and let it glide), the vibration goes away.
Therefore, I am planning on:
- Enabling the Airspeed selector module
- Setting
ASPD_PRIMARYto “Groundspeed minus windspeed”
This I believe should then provide the estimated airspeed data from the ground speed and allow PID scaling, I will have to test this!
PID gains
As you said, FF of 0.2 or higher often resulted in overshoot, so in the flight linked above, I actually removed the FF gains, and only relied on P and I gains.
However, it seems like probably airspeed scaling would help remove the wobble, then I will definitely also tune the PID gains again (and perhaps put FF back in).
Btw is having FF gain very crucial?