PID tuning of a Flying Wing
I have been tuning the PID values of a small (47 cm wingspan) Flying Wing, and noticed that the default values result in oscillations at 5Hz.
The wing is the one shown in the video below, which is incredibly agile (and almost impossible to control manually):

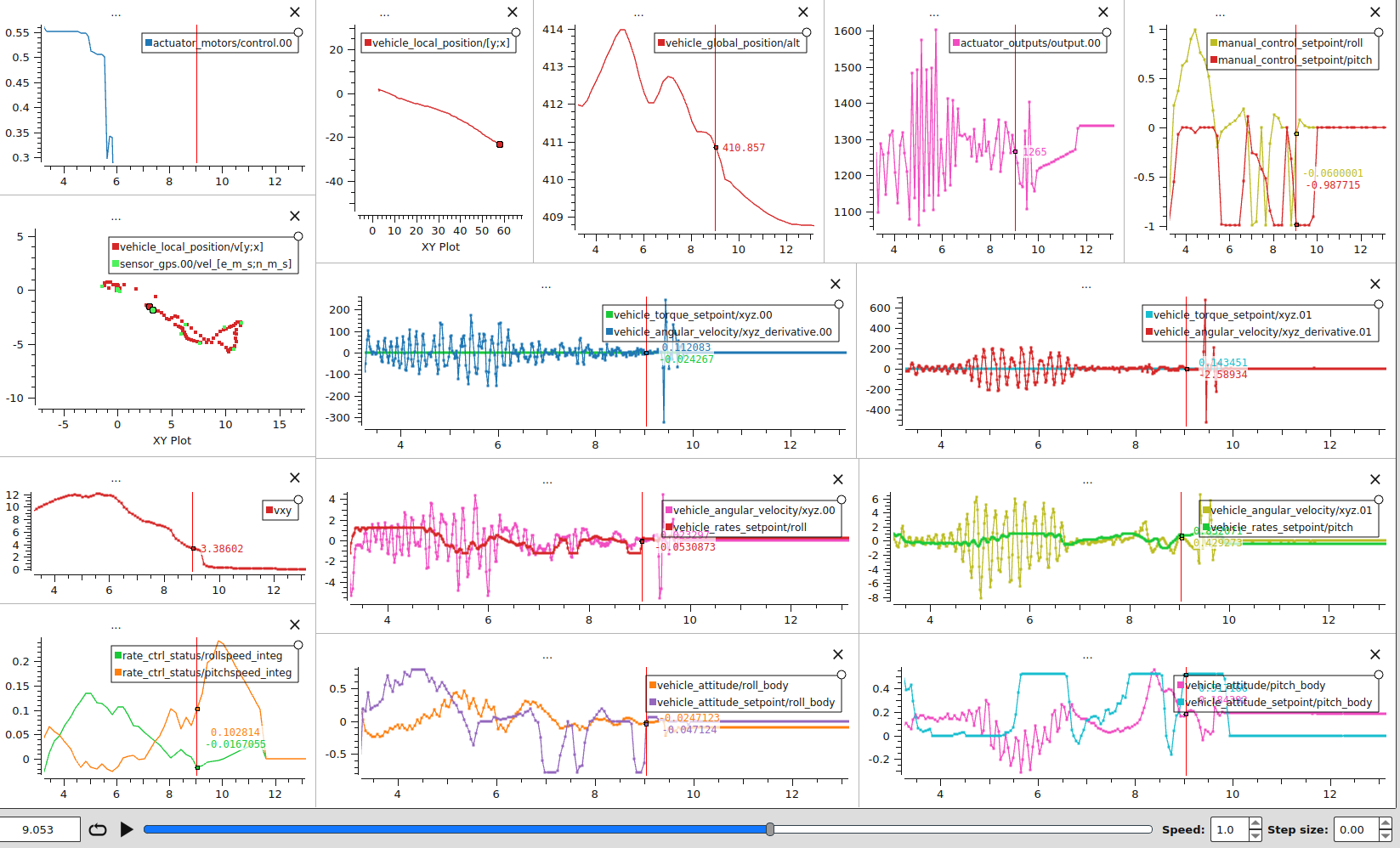
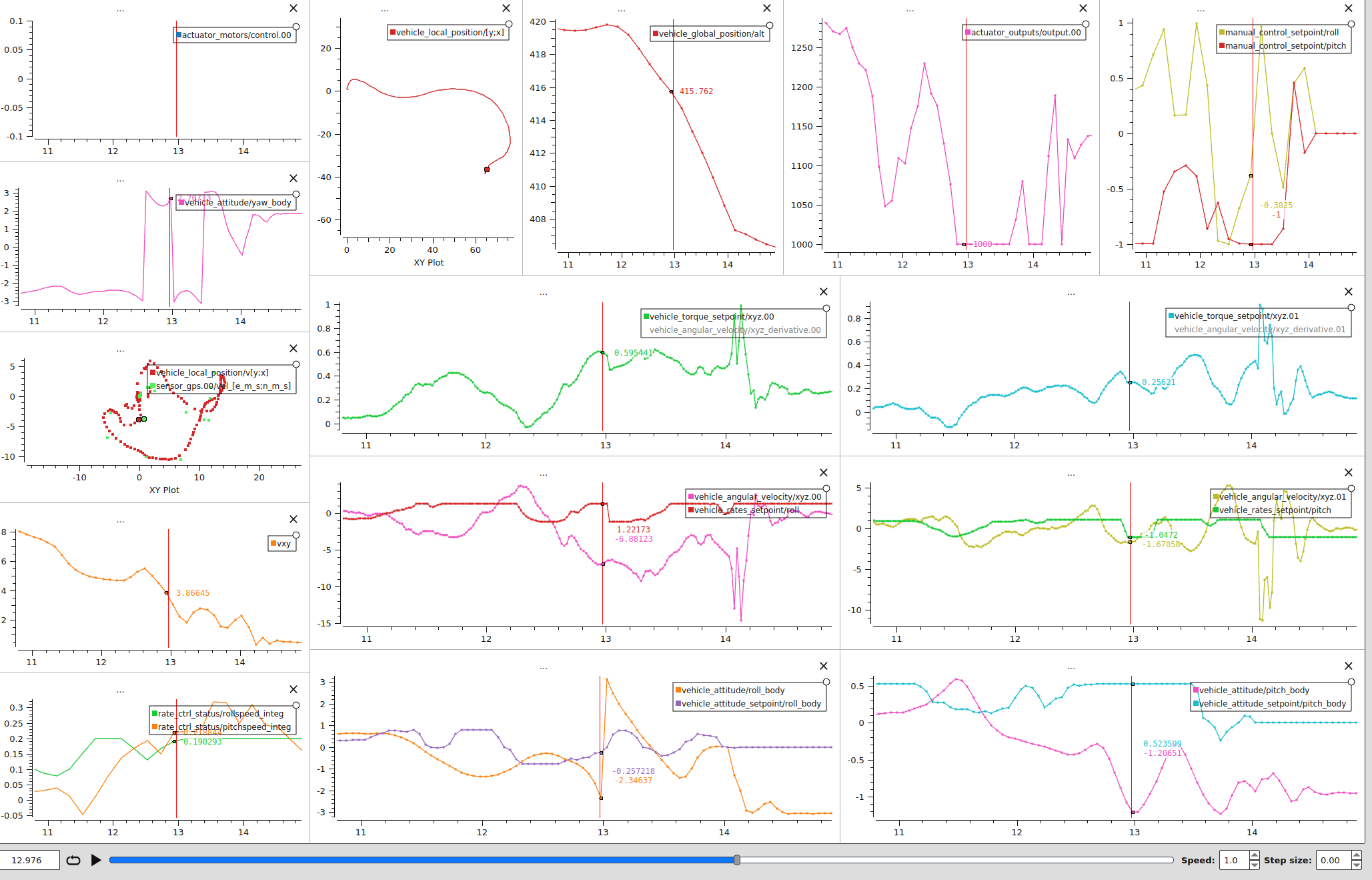
Flight with Default PID
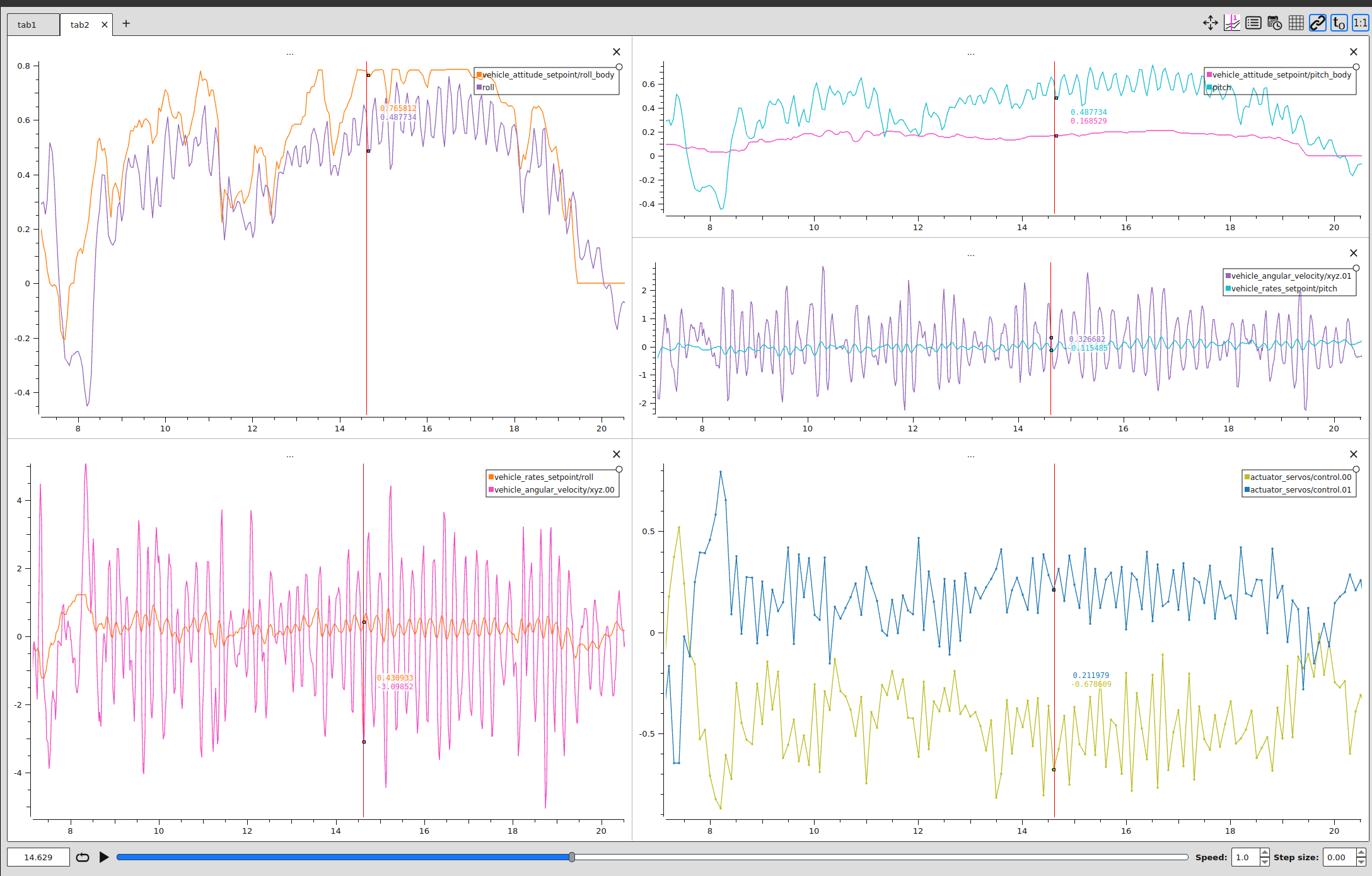
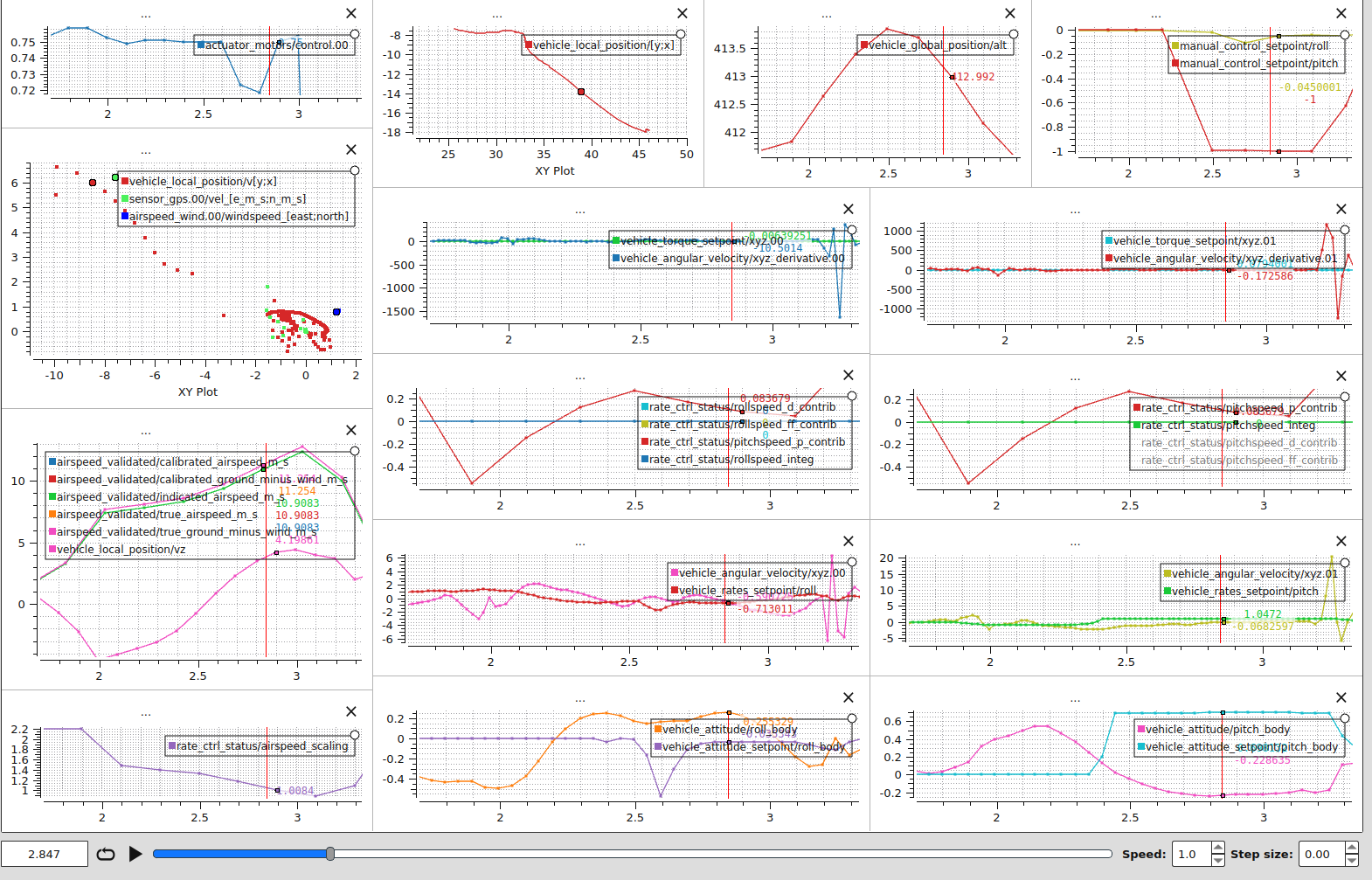
We can observe 5Hz oscillation in roll (and pitch), and the gains were following:
FW_RR_D, 0.0
FW_RR_FF, 0.5
FW_RR_I, 0.10000000149011612
FW_RR_IMAX, 0.20000000298023224
FW_RR_P, 0.05000000074505806
Here’s a log: Flight Review
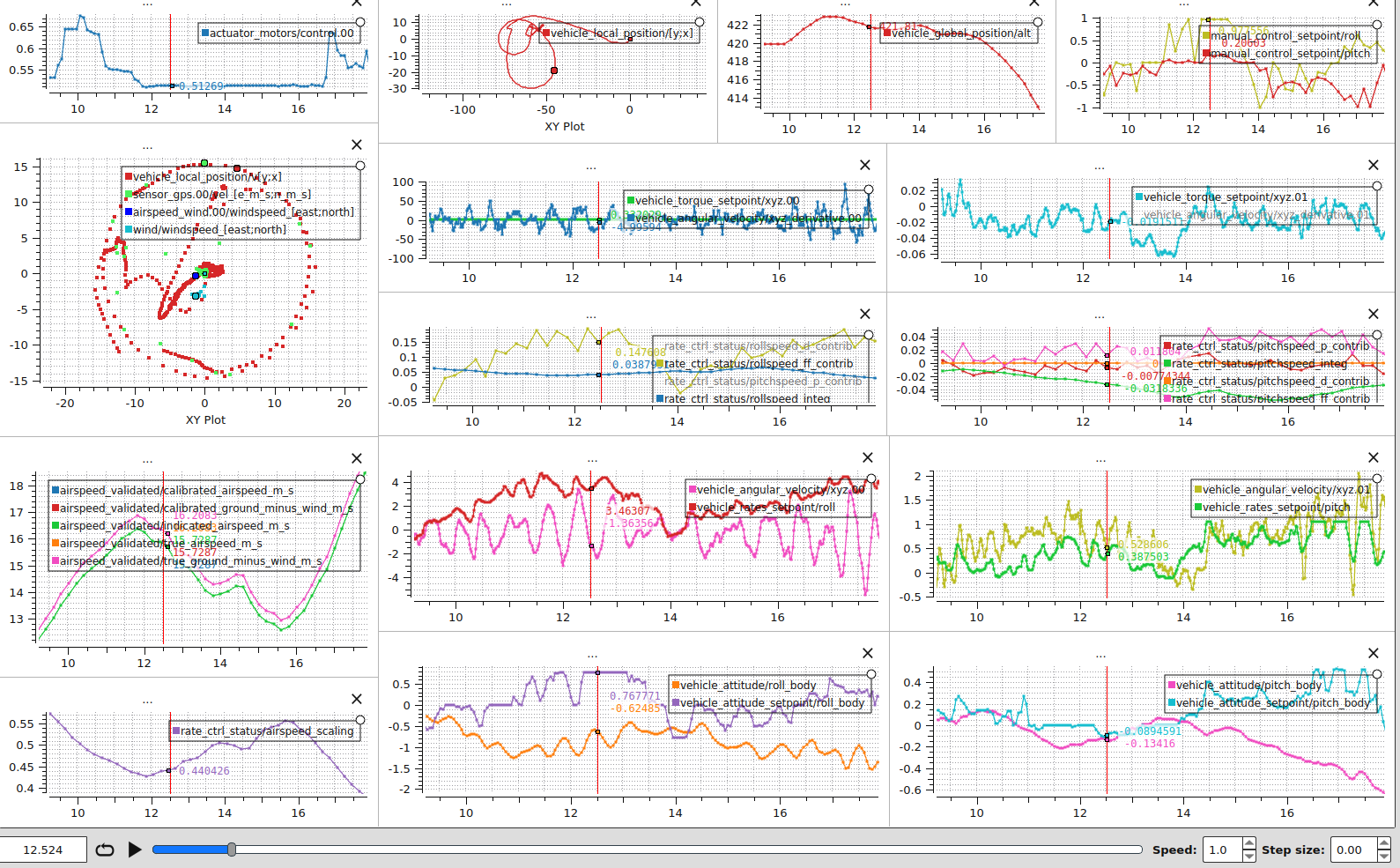
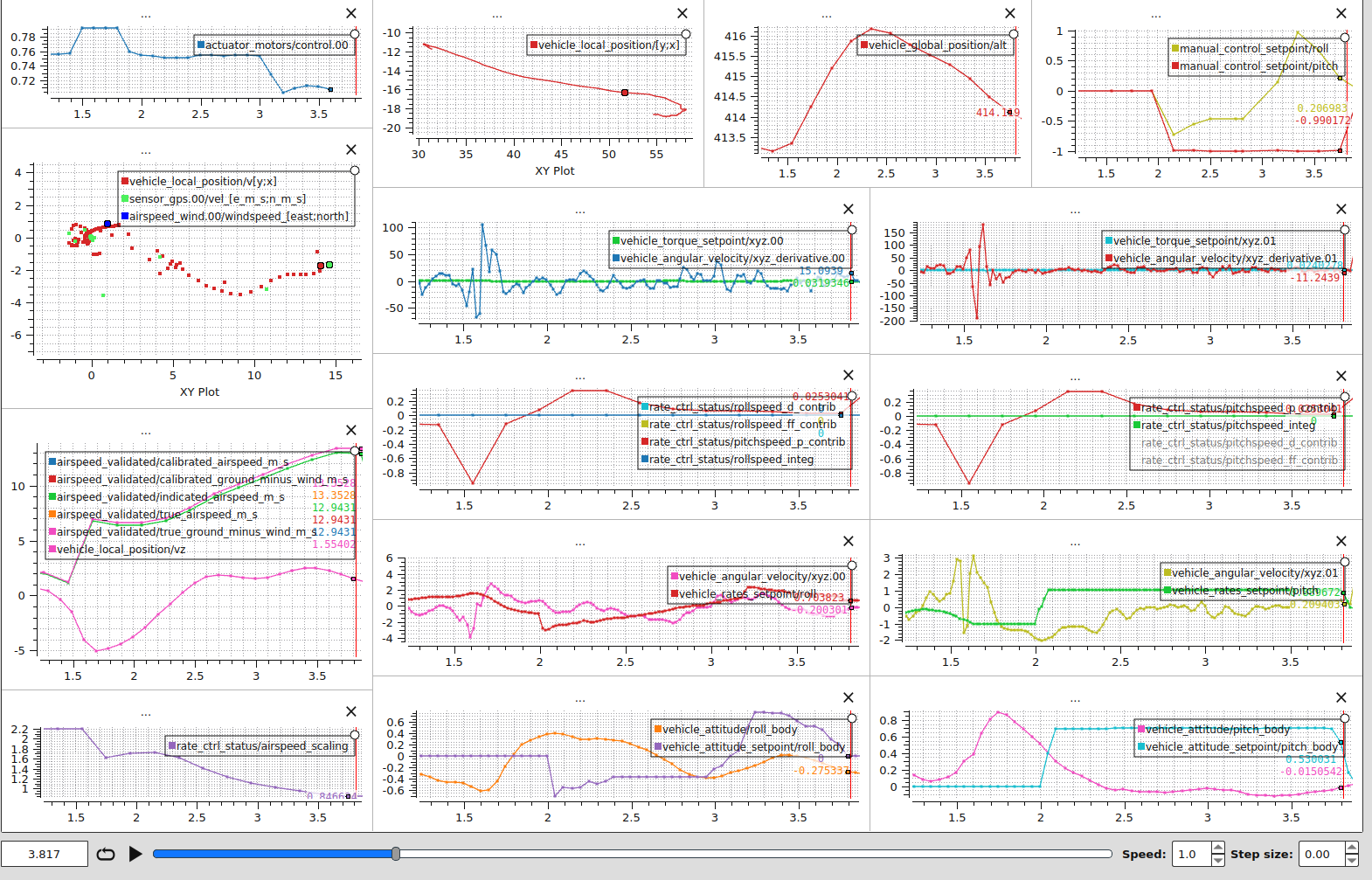
Flight with reduced FF and P gains
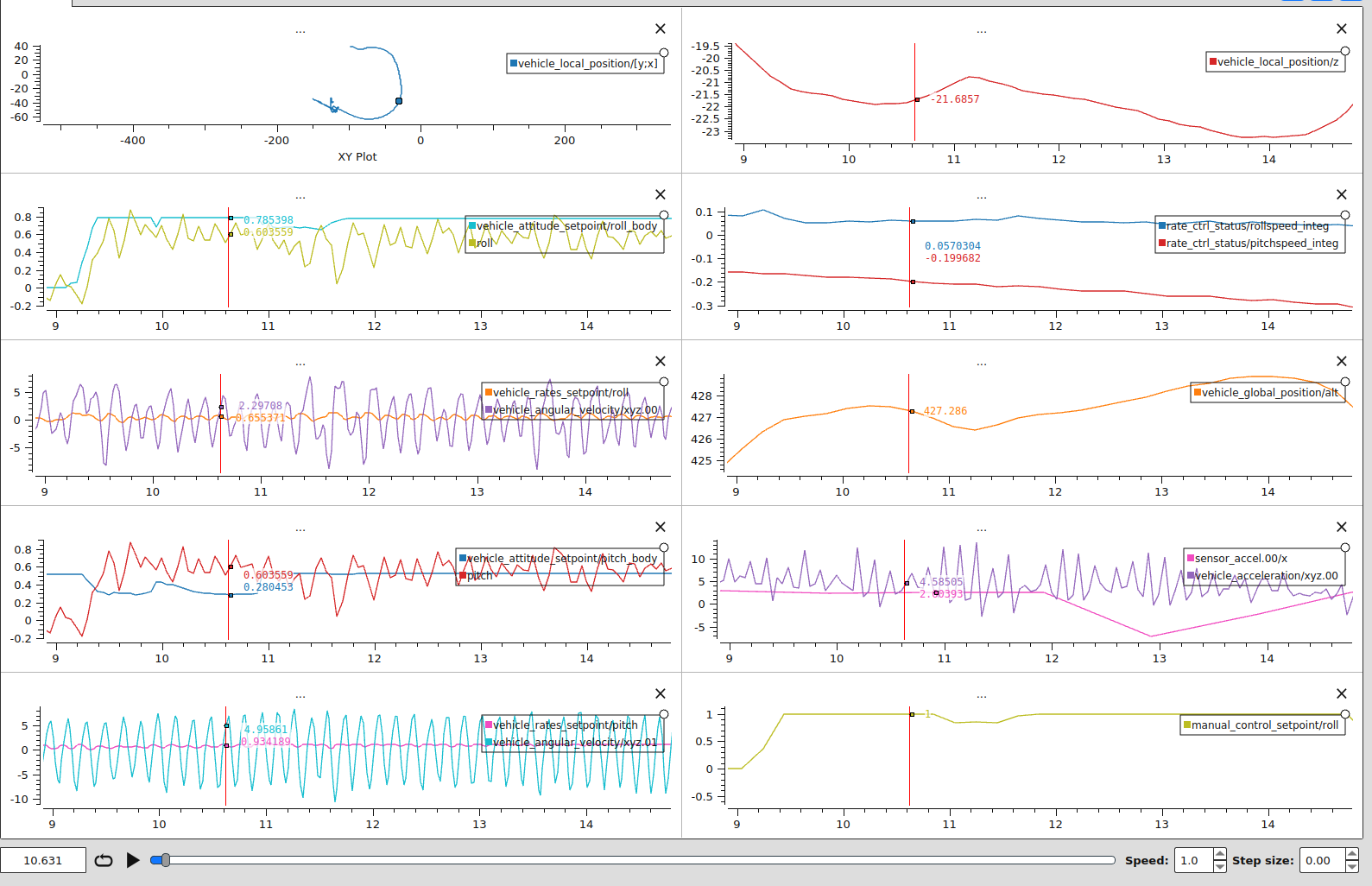
I reduced the FF (0.5 → 0.25) and P gain (0.05 → 0.03), like following:
FW_RR_D, 0.0
FW_RR_FF, 0.25
FW_RR_I, 0.10000000149011612
FW_RR_IMAX, 0.20000000298023224
FW_RR_P, 0.029999999329447746
And from this, I was actually surprised that the oscillation didn’t really improve even with smaller FF and P gains ![]() .
.
Here’s a log: Flight Review
Discussion
The tuning guide suggests to set PID gains to minimum, then start with increasing the FF gain, then tune P, D, and I each.
Questions
So I had 4 questions:
How is it possible that reducing the FF gain and P gain still results in a similar oscillation? Shouldn’t they have been a bit better?
Whether the FW_R_TC for the attitude controller was perhaps too aggressive (which I thought should be the case however, since it’s a small wing).
Whether the D term should be added (currently it’s 0), as without the D, can Fixed Wings achieve the desired attitude without an overshoot?
Whether the auto-tune (which I would try after getting the initial FF gains more satisfactory and with no oscillation) would also work well for such agile platform (this wing is essentially not controllable with manual control)
Thanks in advance!
Notes
Relevant article: Followup of 7/13/22 devcall, FF/Kp/Ki gains ratios