Hello,
The PX4 parameters including the sensor calibration, radio setting and others randomly got reset on the Pixhawk 2.1 with PX4 1.10.1
Setup:
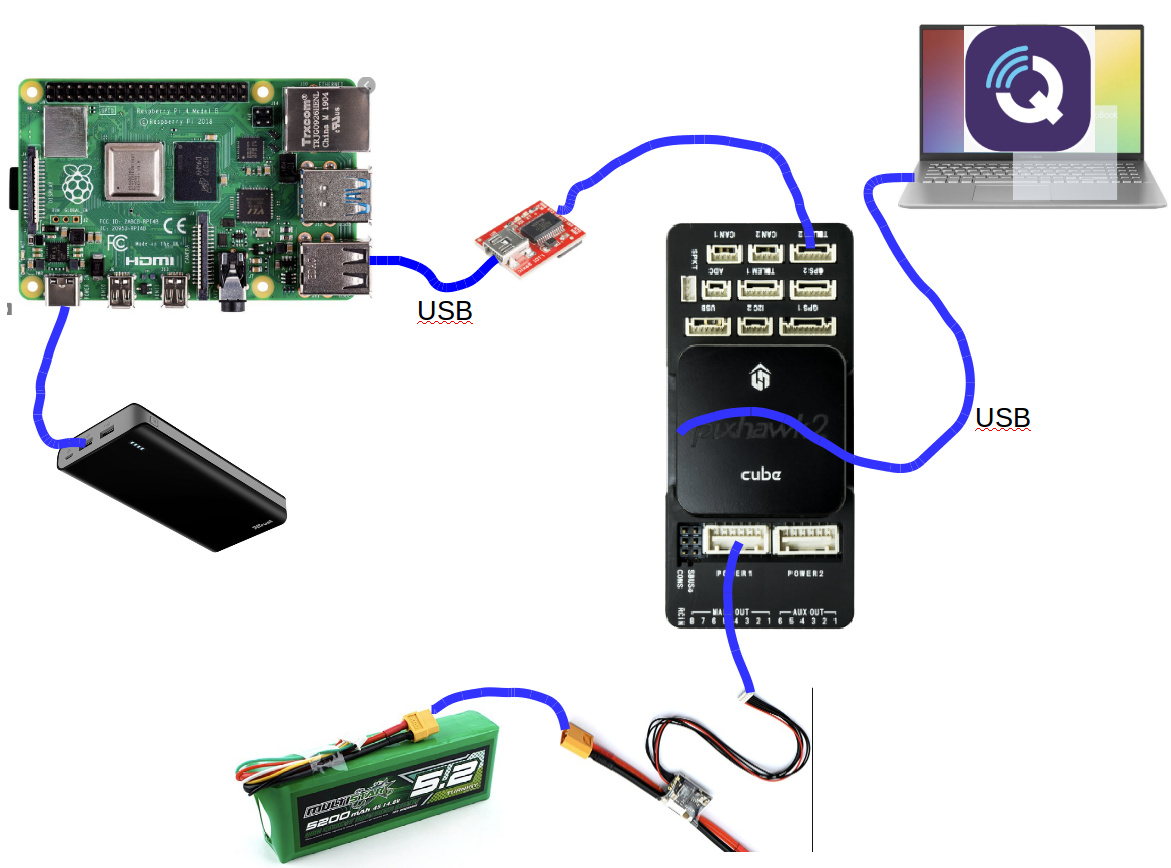
- Iris+ drone with Pixhawk 2.1 powered through a LiPo battery
- PX4 v1.10.1
- Raspberry-Pi4 powered through a power bank to USB-C. The Raspberry-Pi4 is connected to Pixhawk on Telemetry port over a USB-UART FTDi chip.
These were the steps taken:
- Performed a simple take-off and land mission over MAVROS with a companion computer.
- After which I tried to arm the copter manually and it failed.
- Connected the FCU to QGroundControl with USB and the error message was ‘Pre-Flight checks failed’ (this is not there in the log! I don’t know why)
- Lifted the copter up manually and placed in the floor, tried to arm manually and it armed. (I found this sometimes does the trick, once again don’t know why)
- Restarted the FCU, connected to the QGroundControl with a USB and all the parameters were reset (like a fresh pixhwak)
Logs:
https://review.px4.io/plot_app?log=79ef7674-c472-4df0-accd-39ce7ef4725f
I tried the same steps with another Pixhawk 2.1 and I got the same issue. I have a feeling that this happens when the FCU is connected over USB to QGroundControl while the FCU is already powered with a LiPo battery and connected to the Raspberry-Pi4 over telemetry.
Has someone come across this issue before? If yes, is there any way to avoid this in the future?