Hello! I am using a Holybro Jetson Pixhawk Baseboard, where the companion (Jetson Orin NX) and FC (6x pro) have DDS communication through ethernet.
I want to implement visual slam for drone localization. According to documentation, I have to compare 2 values from a log. I got it after moving the drone manually in x, y and z after 2 minutes.
I couldn’t find the variables that the image shows, but I found:
- vehicle_attitude/q.00
- vehicle_visual_odometry/q.00
I am not too sure how to interpret the plots and how to obtain the value. Here is the plot:
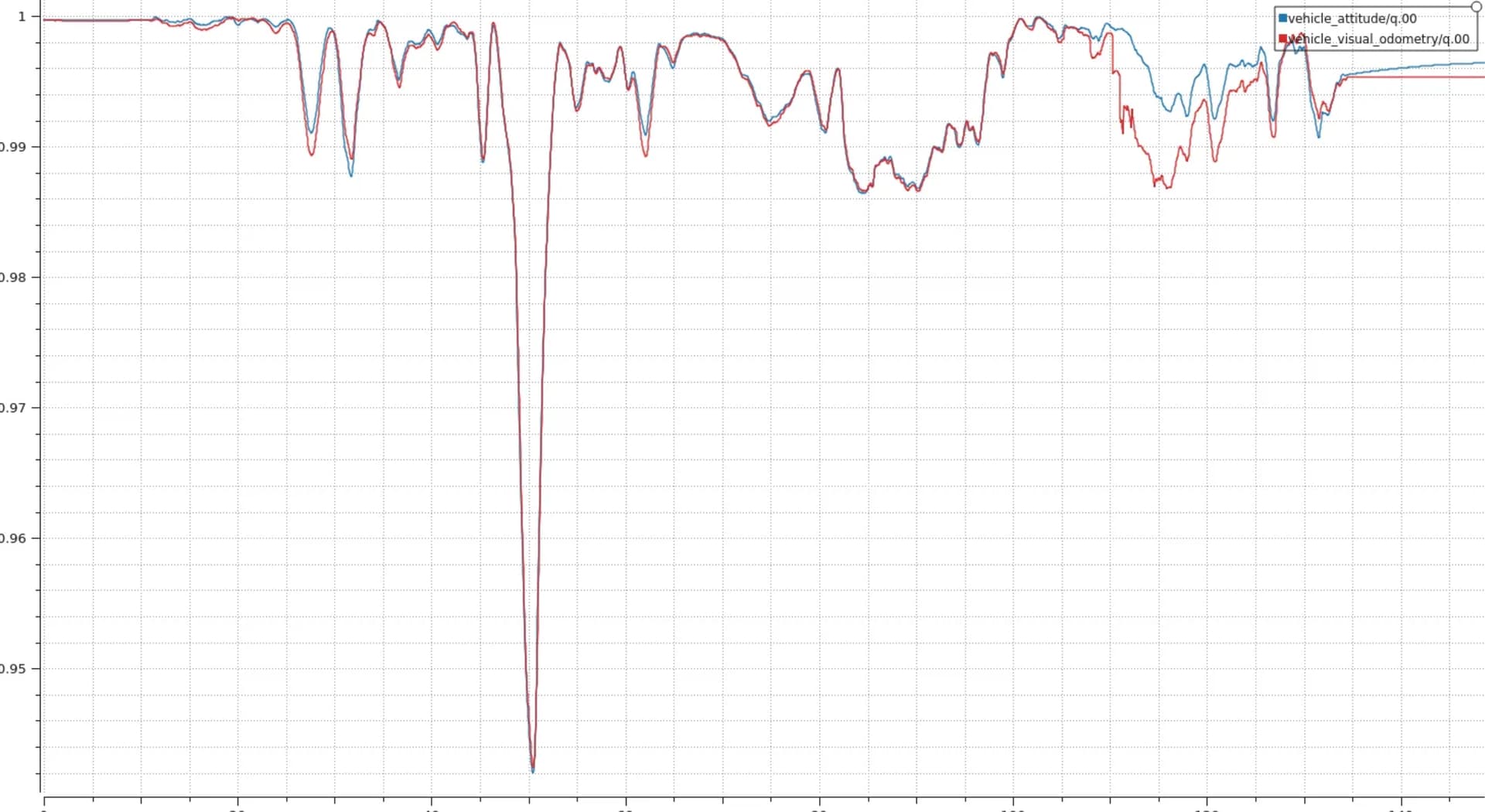
And zooming:
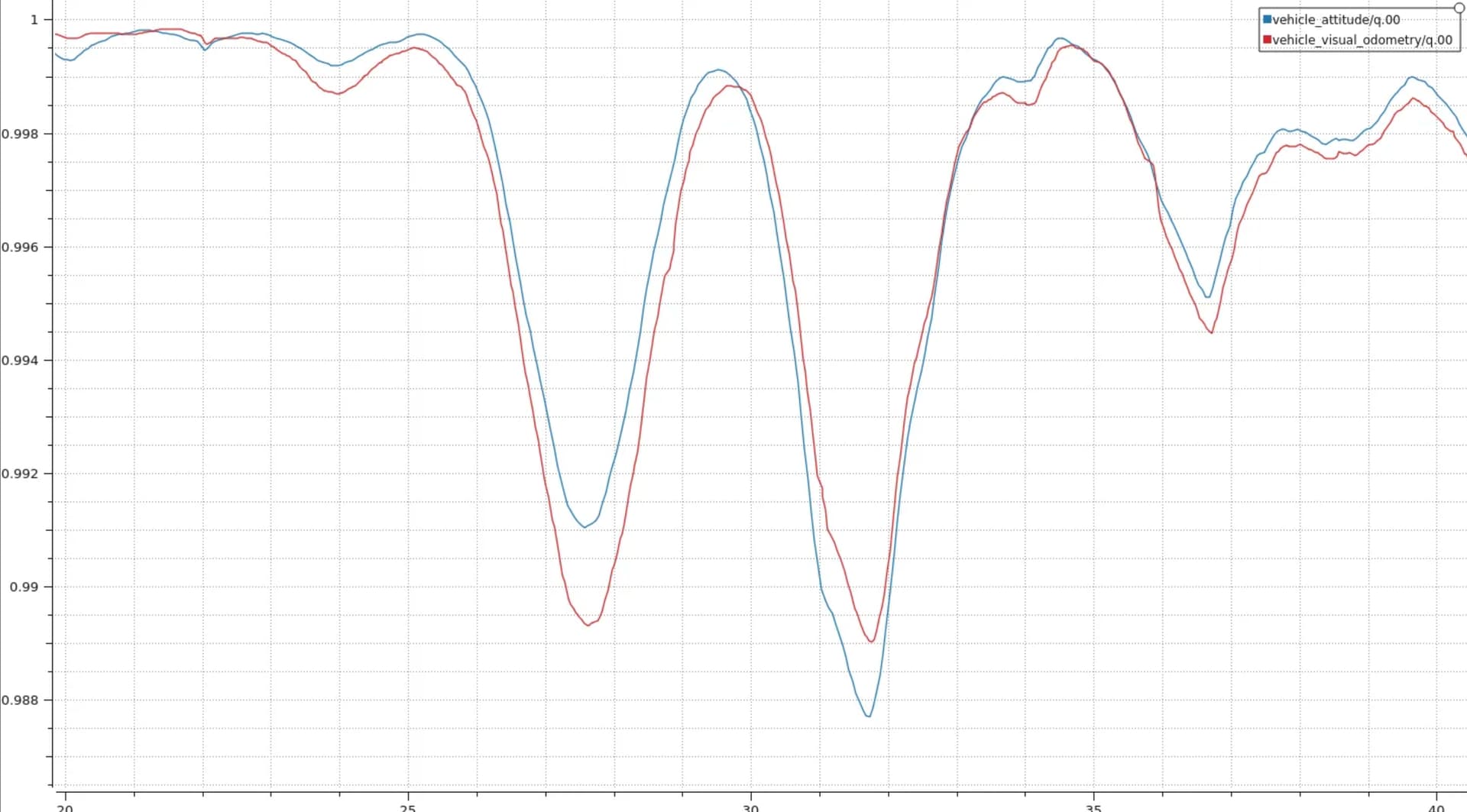
I understand that vehicle_attitude is the generated by internal sensors, and visual, the camera. But there are points where visual is before attitude.
I would greatly appreciate any guidance on how to interpret these plots and obtain the values I need.
Thanks!