We have setup an external vision system for a quadcopter but it appears to have a latency issue (It will start drifting in circles that get worse and worse when it is supposed to hold position). We are trying to calculate what the EKF2_EV_DELAY should be and we created a log of the flight. We enabled bit 7 on SDLOG_PROFILE. Which values in the logs are we supposed to plot to calculate the delay of the system.
We have the following Vehicle Attitude options:
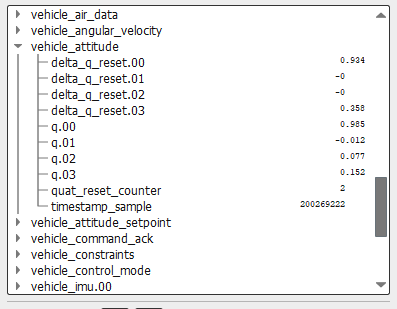
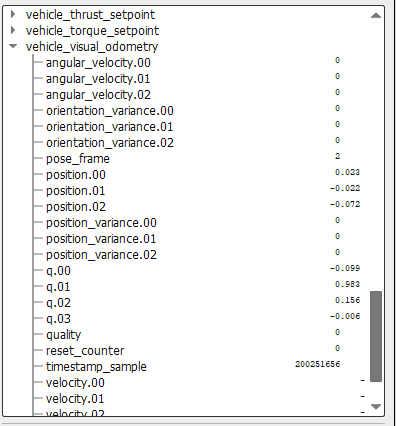
And Vehicle Visual Odometry options:
Following the PX4 guide we plotted Vehicle Attitude q0 and Visual Odometry Q0 and got the following graph:
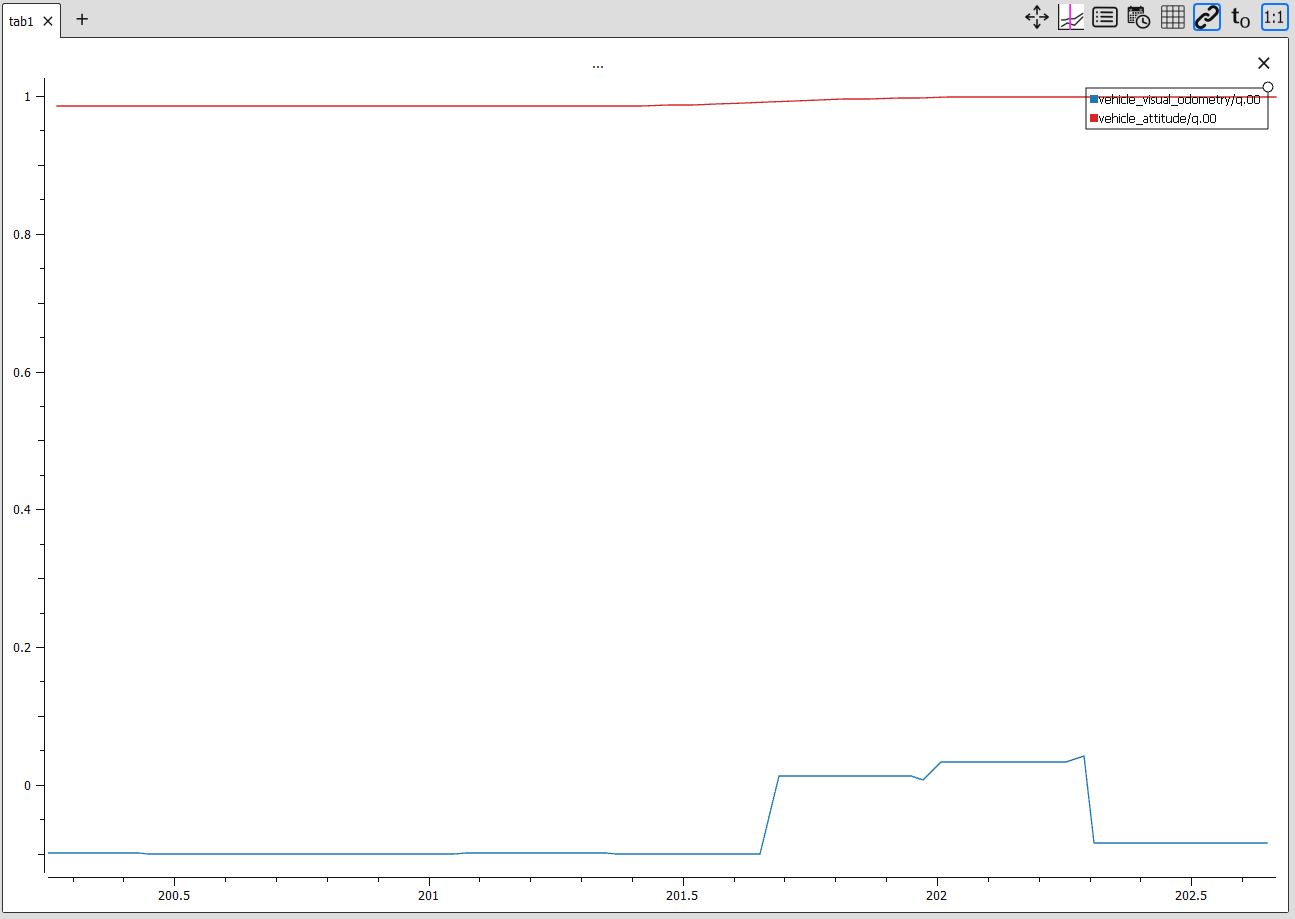
But this result did not make sense. Any help is greatly appreciated