I’ve been trying to develop an offboard mission file in python for the iris model. This offboard model is completely based on the offboard_position_ned.py file that can be found in MAVSDK-Python-main/examples.
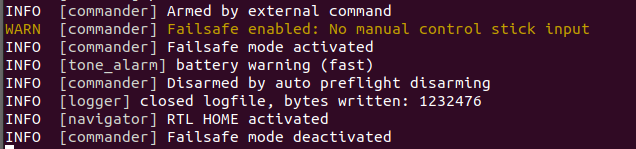
The problem comes when after arming the iris the following message is printed by the terminal:
In my offboard file i have tried to write the initial setting point before and after the offboard mode begin command, but nothing works.
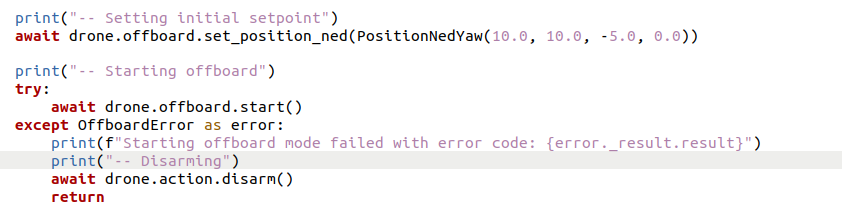
This is a part of my .py file
Hey there,
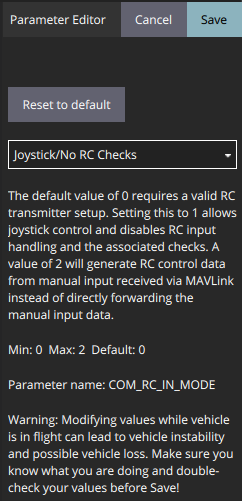
from what it looks like the drone has parameter COM_RC_IN_MODE set to 0.
You need to set it to 1.
I think you should be able to change the simulated drone’s parameters in QGC but not 100 percent sure, you might have to do it in the files before compiling.
cheers
Thanks for your fast answer @Christian-Born.
I have tried but it does not work. The python code that I’m trying to run is the one available in MAVSDK-Python-main\examples\offboard_position_ned.py, but I am not being successful because the drone seems not to obey the PositionNedYaw function.
Have you try anything like this or any offboard flight recently?
Thanks again!
Yes, I have but only IRL since I’m not working much with the simulator personally.
I was just quickly judging from your screenshot and the corresponding error message because I encountered this exact situation before. ,)