Hi, every one!
I use Pixhawk 5X and Raspberry Pi4 as co-computer.
In Offboard mode I call offboard.set_velocity_ned at 100 Hz.
I saw in class Offboard · MAVSDK Guide that MavSDK automatically sends setpoints at 20Hz.
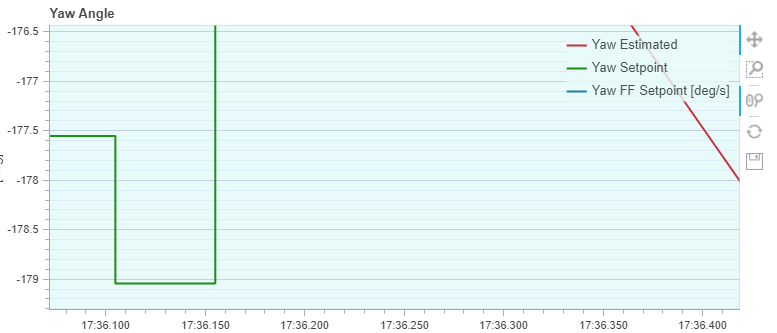
In same time I see In Flight Review that Yaw Setpoint arrived every 50 ms (20Hz).
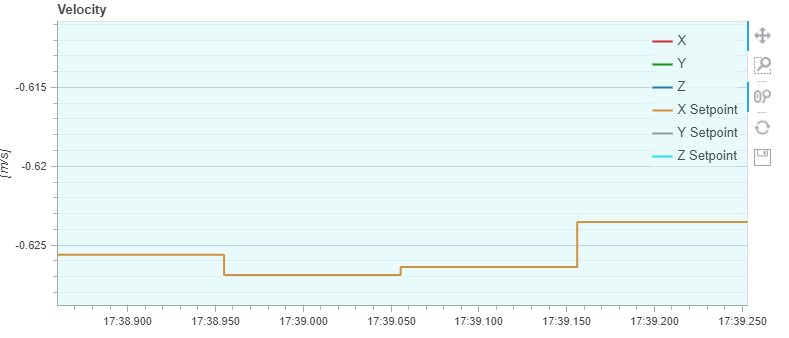
Velocity Setpoint arrived every 100 ms (10Hz not 20Hz)
I changed in offboard_impl.h const float SEND_INTERVAL_S from 0.05 to 0.0166f and rebuild MAVSDK lib. After that no change happened…
Is it posible to up rate offboard.set_velocity_ned, and how it do? At least I need 60 Hz.
Any insights are greatly appreciated.