Hello All,
I am using holybro kakute H7 with v1.14, but connecting to it with QGC, is not showing the Actuators Tab required to configure Dynamic mixing.
Can anyone help to unblock me on this?
Note that “SYS_CTRL_ALLOC” parameters which exists on v1.13 and should be enabled to see this tab, does not exist in v1.14, which I assume is because
dynamic mixing is the supported method.
What am I missing?
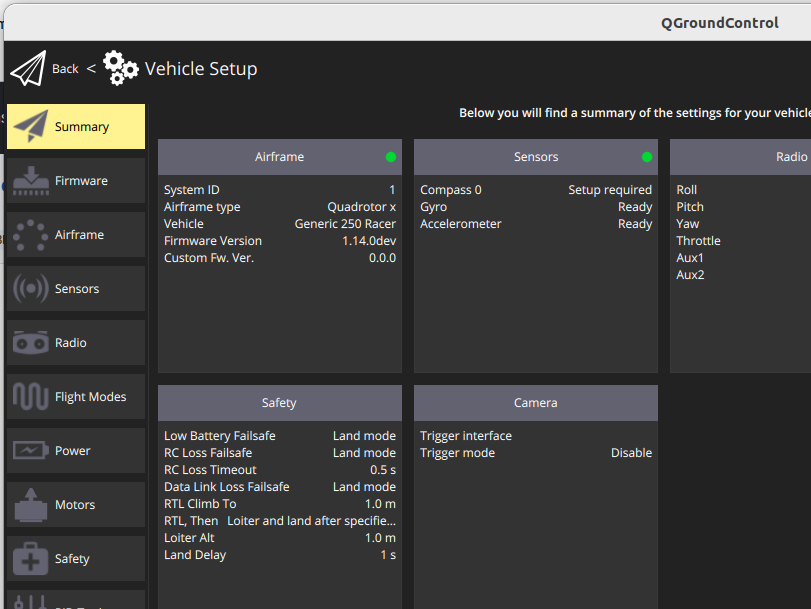
See QGC image showing v1.14 and old motors tab together.
Also, how are you connecting to the autopilot? WiFi by chance? There were/are some instances where a udp connection to the autopilot doesn’t get the correct messages needed for the actuators tab.
Hi @ryanjAA , Thanks for the reply.
I am using a rather new QGC, 4.3.0.
I am also using a WiFi to connect with QGC - Are you saying there is a known issue when working WiFi+UDP and QGC?
What method are you using?
If you have any info on that please share (links, ticket, docs etc.)
If the actuators tab does not show up and you are using Wifi to connect to QGC, I suspect the parameter metadata is getting lost or corrupted via the lossy network. This also happens with botched serial connections.
You could try over a LAN cable and see if the param metadata transfers correctly
Sorry for the confusion. I am not working with a Holybro Kakute H7. I am working on getting a custom drone running with PX4. For this, I used the code for the Holybro Durandal v1 and adapted it to match my hardware configuration.
I am trying to understand how QGroundControl decides whether to show the “Actuators” or “Motors” tab. During the build process, I noticed that an “actuators.json” file is created and flashed onto the filesystem in etc/extras. This file is then requested by QGroundControl via the Component Metadata Protocol. (PX4 Metadata | PX4 Guide (main)). I also reviewed the logs in QGroundControl but couldn’t find any indication of what might be causing the issue.
Have I understood this correctly? How can I verify that the file successfully reaches QGroundControl? If the file is present and correctly parsed, shouldn’t the “Actuators” tab appear? Is there perhaps another parameter or variable, such as a version string, that QGroundControl checks to decide which tab to show?
After a long search, I finally found the solution to my problem, and I feel so silly now. I was correct in my assumption that QGroundControl requests the actuators.json file via the File Transfer Protocol (FTP). However, you need to explicitly inform MAVLink to enable FTP during startup. So, I changed mavlink start -d /dev/ttyS1 to mavlink start -d /dev/ttyS1 -x, and now the actuators tab is displayed.