Hey guys,
I’m trying to read out position values via python.
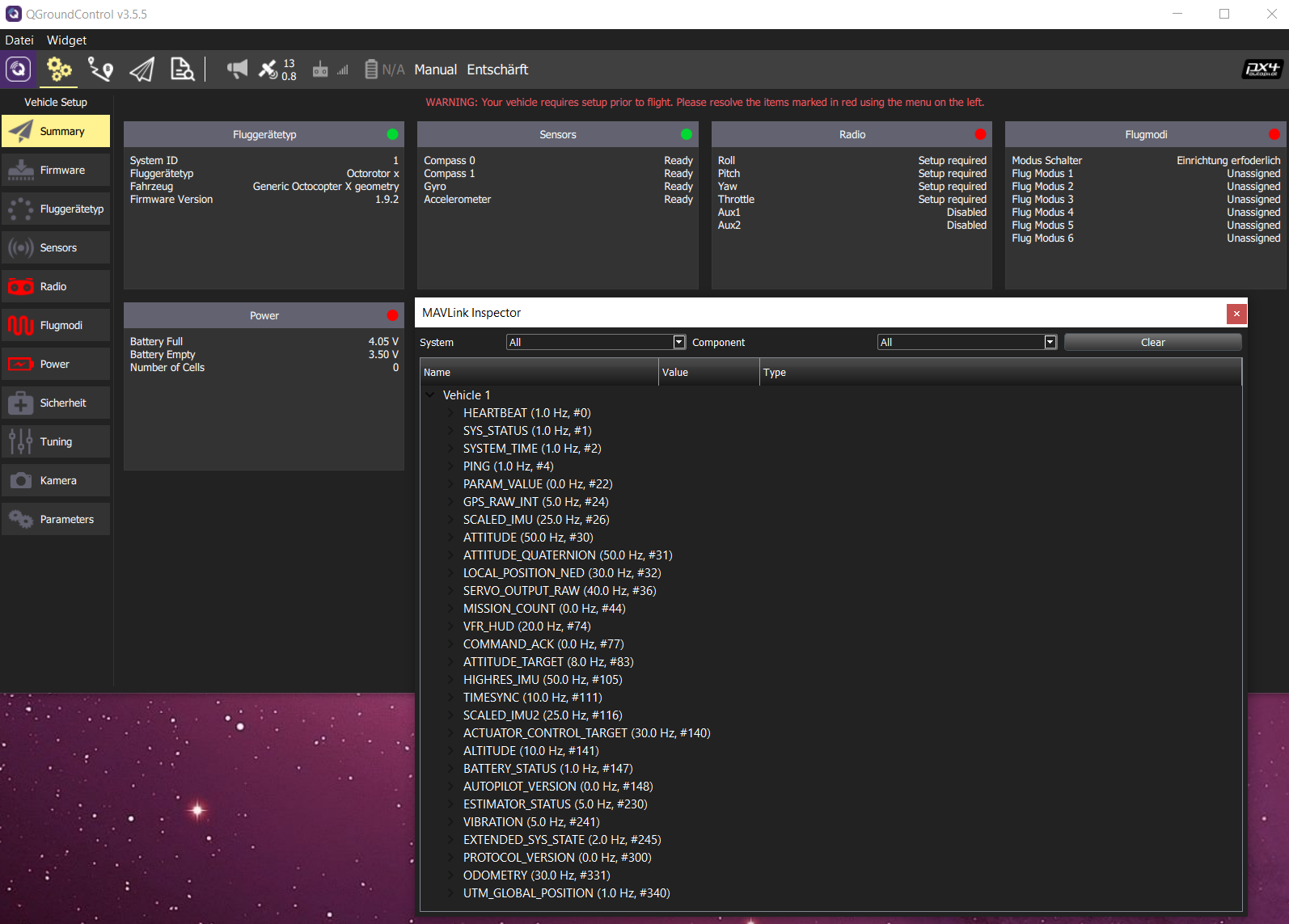
I want to use the GLOBAL_POSITION_INT message, but it seems like I’m not even receiving it.inspector|690x494
As you can see, i have GPS signal. I’m also receiving GPS_RAW_INT.
Any suggestions how i could fix my issue?
Greets
Hi,
I am having a similar problem. I am using Pixhawk 4 and u-blox-7 GPS. I am receiving GPS_RAW_INT at 4Hz, GPS lock is 3DGPS. I receive GLOBAL_POSITION_INT at 10Hz, but as soon as I start moving GLOBAL_POSITION_INT rate drops to 0Hz and only when Pixhawk is stationary GLOBAL_POSITION_INT rate goes back to 10Hz.
I even modified ubx.cpp file to simulate excellent accuracy, however this doesn’t seem to help. I can’t find in the code what parameters affect GLOBAL_POSITION_INT rate.
I have to make this work without using UBX_MSG_NAV_PVT. I am need Pixhawk to work with UBX_MSG_NAV_SOL and UBX_MSG_NAV_POSLLH and UBX_MSG_NAV_TIMEUTC messages.
With UBX_MSG_NAV_PVT everything works fine.
For those who might stumble on a similar problem - GLOBAL_POSITION_INT message shows in QGC as long as gps_is_good(gps) is true for the last 10 seconds. It is called by collect_gps() and declared in gps_checks.cpp.
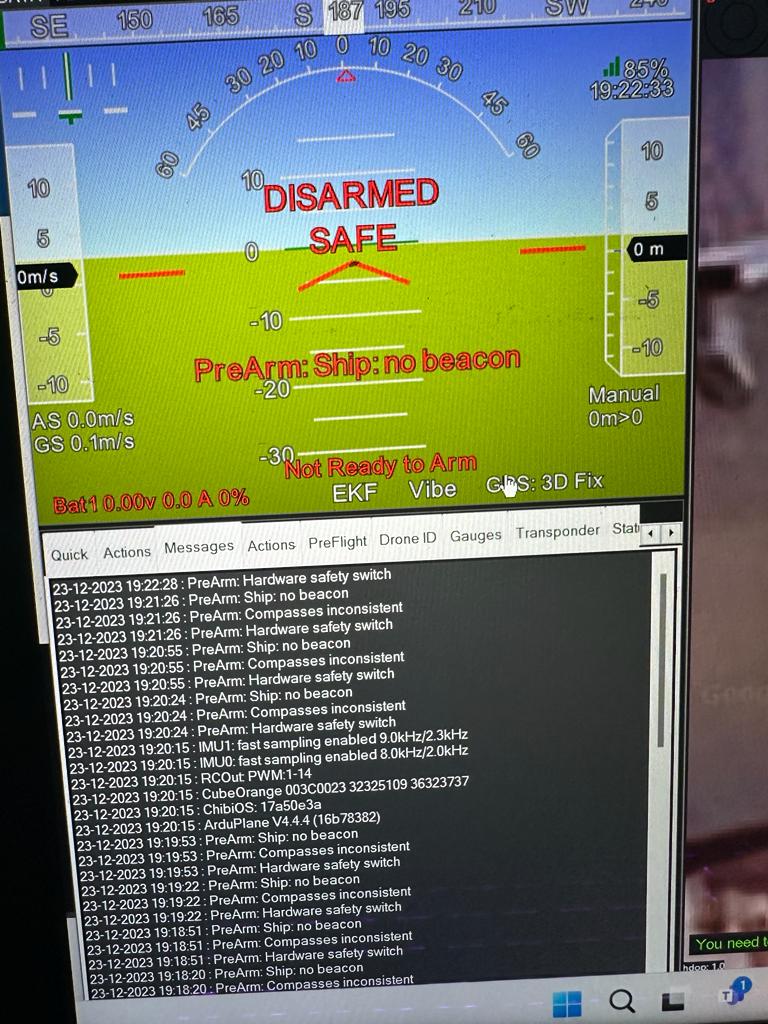
hi kurts my name is tamilazhagan. am doing arudopilot moving platform takeoff and landing in ship using quad plane. for that i used rover with cuav v5+ autopilot as a ship beacon. other orange cube+ quad plane. as per the arudopilot document all parameters i set successfully. for communication am using 3 rfd900x with multi point network. gcs will consider as a master other beacon and quadplane is a slave. now i can connect beacon and quad plane to my gcs both are showing even both gps are fixed. but i did not get GLOBAL_POSITION_INT message from beacon to quad plane.
it is showing no beacon. in gcs. so kindly help me about this issue
{kind=link}
U got the solution I want to know how to send global coordinates as waypoints I am receiving GPS coordinates through this topic /fmu/out/vehicle_global_position