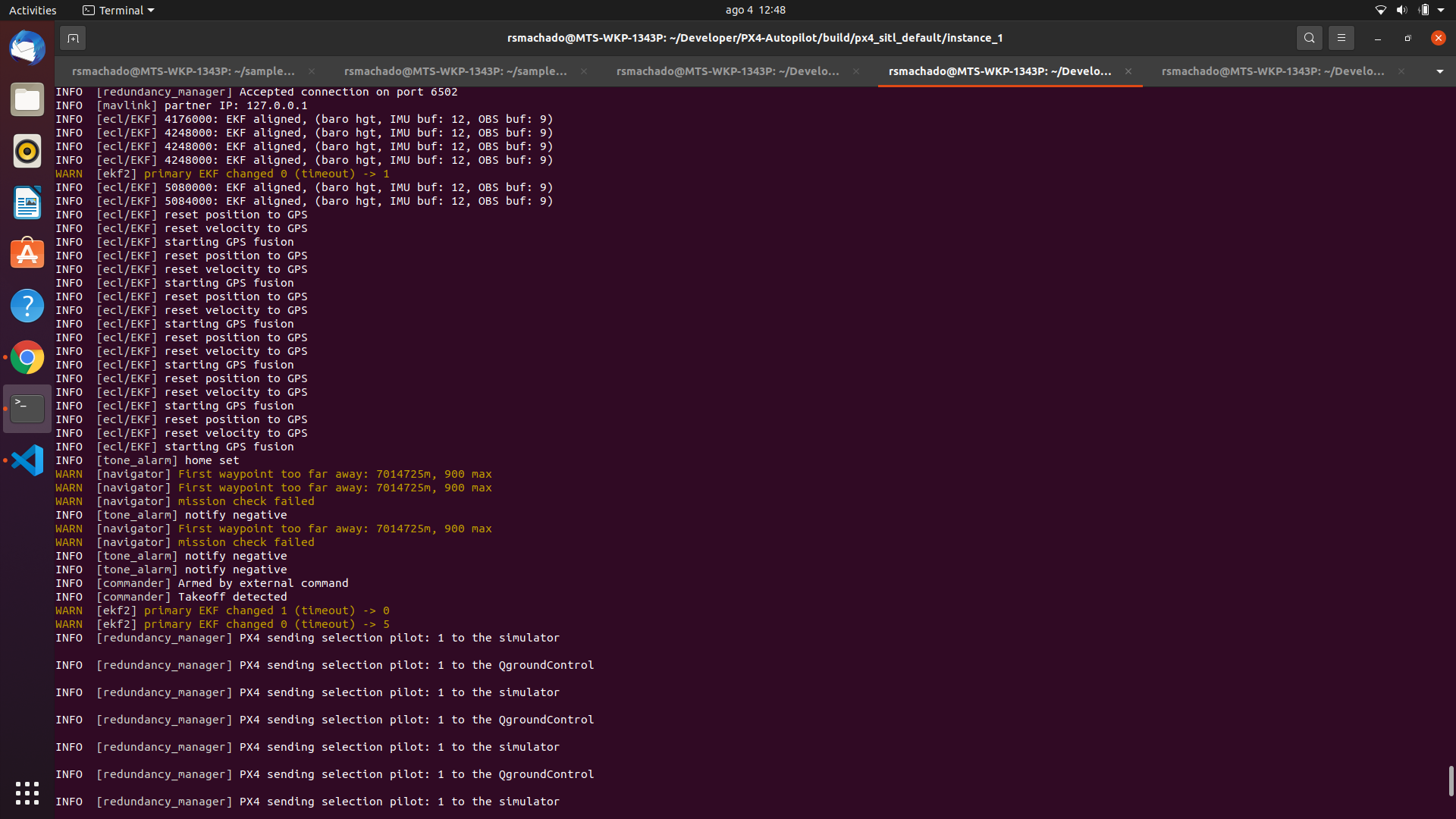
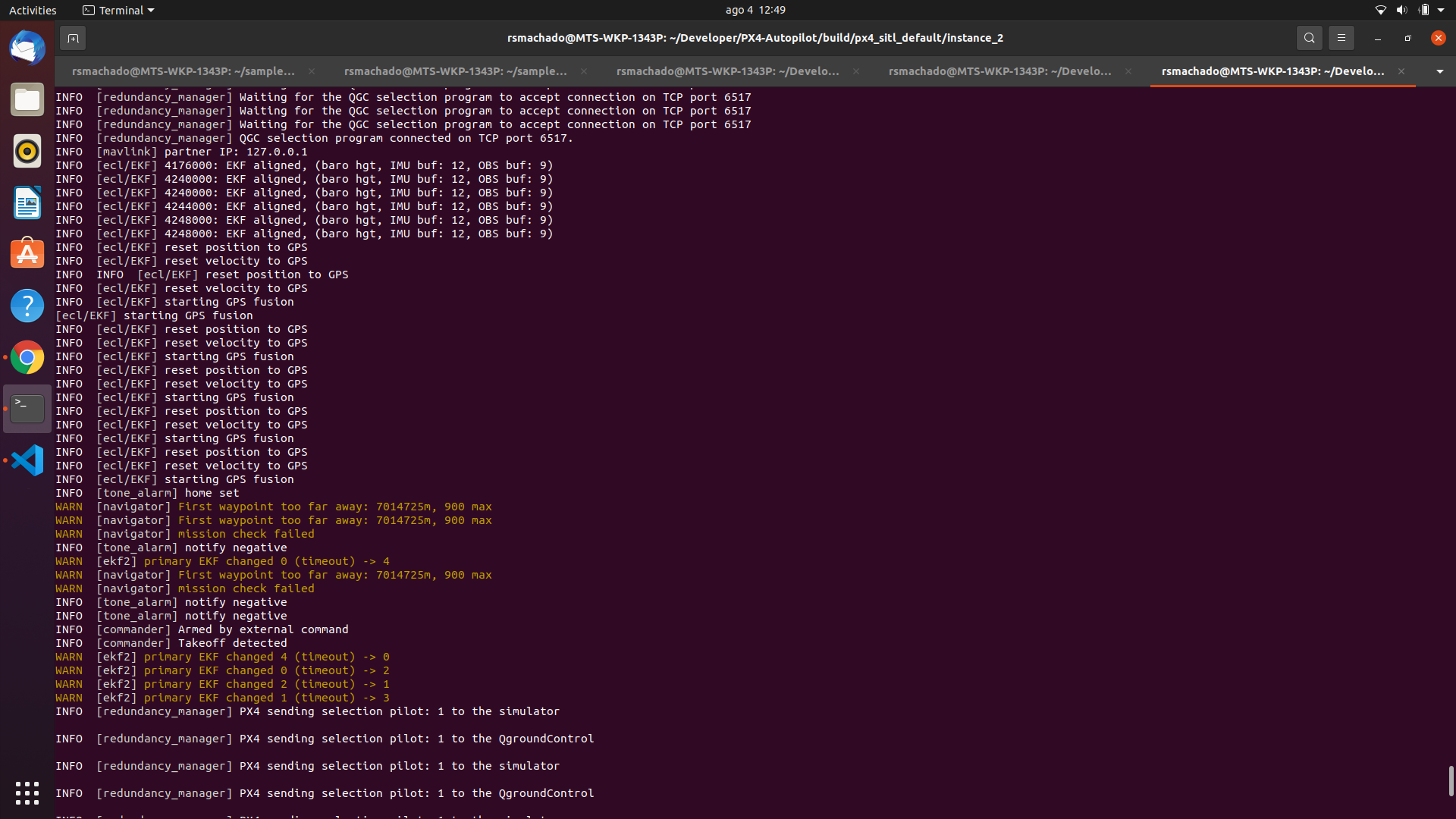
How is it possible, using exactly the same simulator data from gazebo, obtain three different answers to the 3 PX4 instances? I have two programs to route the packets from the same vehicle to the three different instances and another to send the same mission commands from QGC to the three PX4 instances.
One of them I ran with make px4_sitl gazebo, the other two I ran through
the binary: …/bin/px4 -i 2 ~/Developer/PX4-Autopilot/build/px4_sitl_default/etc/ -s etc/init.d-posix/rcS -t “/home/rsmachado/Developer/PX4-Autopilot”/test_data). The last two give the same error: WARN [navigator] First waypoint too far away. The first one is working and takes over the vehicle.
I also did at the three instances terminal before running them.
export PX4_HOME_LAT=28.452386
export PX4_HOME_LON=-13.867138
export PX4_HOME_ALT=28.5