Hi all,
I have a short experience using Pixhawk and Simulink and I would like to share the issues faced for the benefit hoping no body talked about it before.
The Pixhawk autopilot design was indented for a course project. I used Pixhawk2.4.8 and Matlab2023a, 2023b, 2024a versions with “PX4 Autopilot Support”. Based on your Matlab version, the autopilot library downloads PX4 version. If you used Matlab2023a/b, it downloads PX4v1.12.3 otherwise PX4v1.14.0 (at my time). Also, interaction between your operation system and Pixhawk (PX4 build, upload and other functionalities) differs based on that by using Winsows itself for first case and Linux (through Windows Subsystems for Linux) in second case. The main issues I want to clarify:
1- Pixhawk 2.4.8 (=Pixhawk1) has 2mb ram but limited by software for safety concerns to 1mb while Pixhawk1 has only 1mb. Both versions are old and modern version exists like Pixhawk6C.
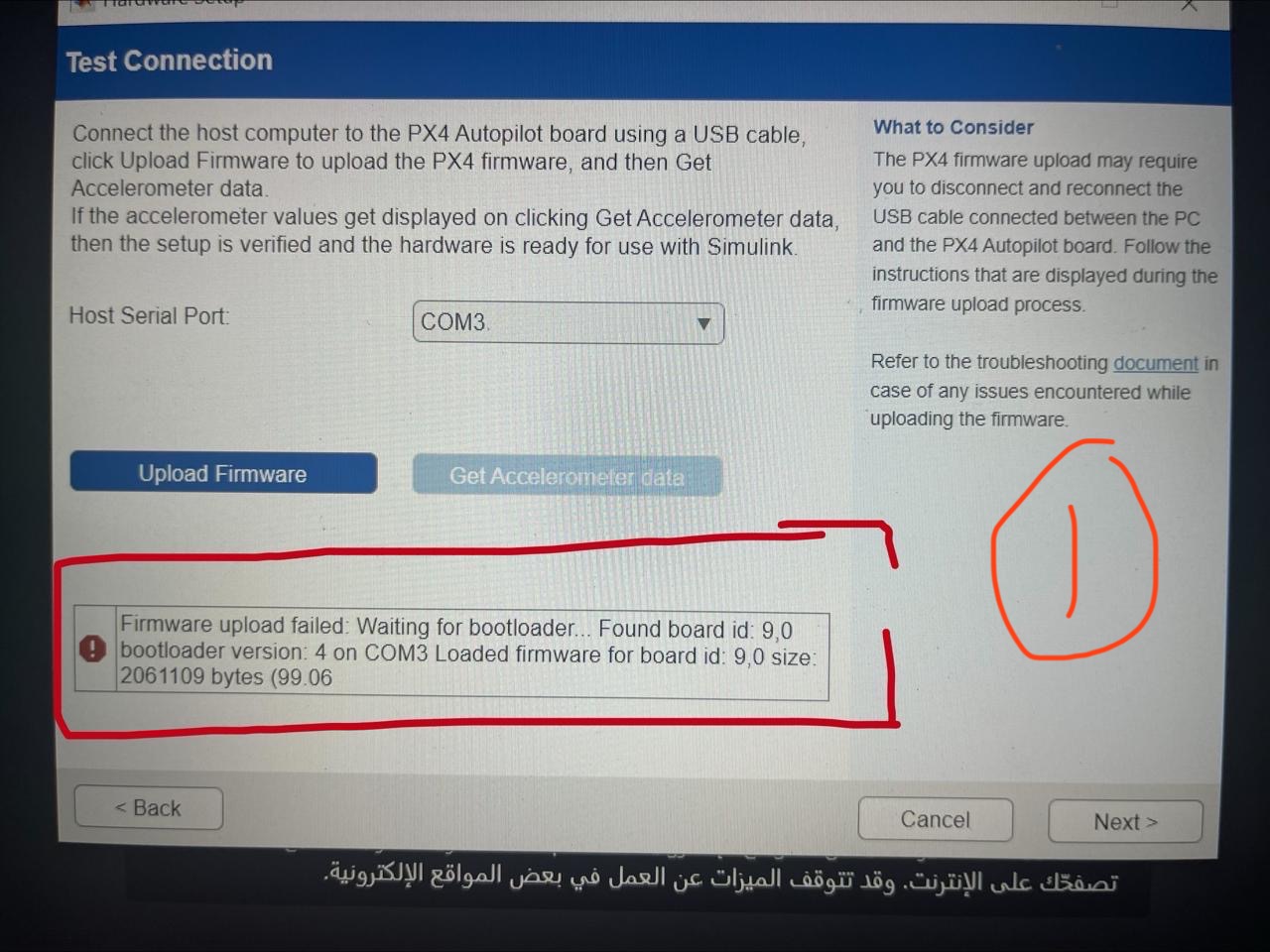
2- Use Matlab2023b only to interact with Pixhawk 2.4.8 since it is later version of 2023a that has bugs like not exceed software limit of 2.4.8 Ram and it will always gives the error in Image1 when uploading the build (controller).
3- Both Matlab2023a/b has an important option from the device setting to FORCE build/upload which pypass the ram limit but 2023a still gives limit error.
4- Matlab2024a remove FORCE option which make it difficult to upload any thing unless you remove libraries from the Package which make the build lighter but I do not how to do it.
5- Even when using the proper Matlab/PX4 versions , Pixhawk 2.4.8 shows very slow response and data acquisition
Finally: I read briefly about another package " UAV Toolbox Support Package for PX4 Autopilots" can deal with Pixhawk.
Thank.
Hi @pwi23270,
thanks for sharing your experience.
I also tested the PX4 Matlab toolbox during my first year of PhD (late 2020, beginning of 2021). I started with the Pixhawk 2.4.8 and rapidly switched to a better one (Pixhawk cube black, at that time).
The old Pixhawk 2.4.8 had a lot of problems, making the work very hard for no reason.
I would suggest you to switch to the Holybro Pixhawk 6c, instead of trying the other toolbox.
Also, what do you want to do with the toolbox? because the PX4 toolbox gives you more options to work with PX4.
Thank you Salmarc.
Indead what you said, but Pixhawk 2.4.8 is widely spread due to its price. Most probably many students will try to work on it. I do not know whether PX4 toolbox allows to design Pixhawk autopilot, I just jumped to Simulink upon the suggestion of my experienced professor. The goal was to design quadcopter hover stage autopilot and apply disturbances to see stability.