Greetings,
I have looked up similar threads but was unable to find a solution.
I am trying to add two vehicles to my launch file, one being H480 for video streaming and I’d like to capture images/videos of another drone (e.g., Iris) and further use these images for deep learning training.
I have looked at the following link since I use QGroundControl and Gazebo:
https://dev.px4.io/master/en/simulation/multi_vehicle_simulation_gazebo.html
What I struggle is to set proper parameters for these two vehicles.
At first it simply looks like basic XML manipulation, but I am still a bit riddled.
To further elaborate, I see that multi_uav_mavros_sitl.launch file refers to single_vehicle_spawn.launch which has iris by default. I thought that I should be setting vehicle 1 (2nd) as Iris and vehicle 0 (1st) as H480 since I would like to capture images from that one.
However, I can’t find where to find correct id’s for each vehicle.
Any tips regarding how to setup PX4 launch configuration and ideally with another world file would be appreciated a lot.
Take care, Taha.
I see that H480 is not supported in multi-vehicle setup. I’m looking for workarounds, any help regarding this would be greatly appreciated.
@bonellia It should work with typhoon using the bash script
@Jaeyoung-Lim
Thanks for your response.
I’ve tried the following command from PX4-Autopilot directory.
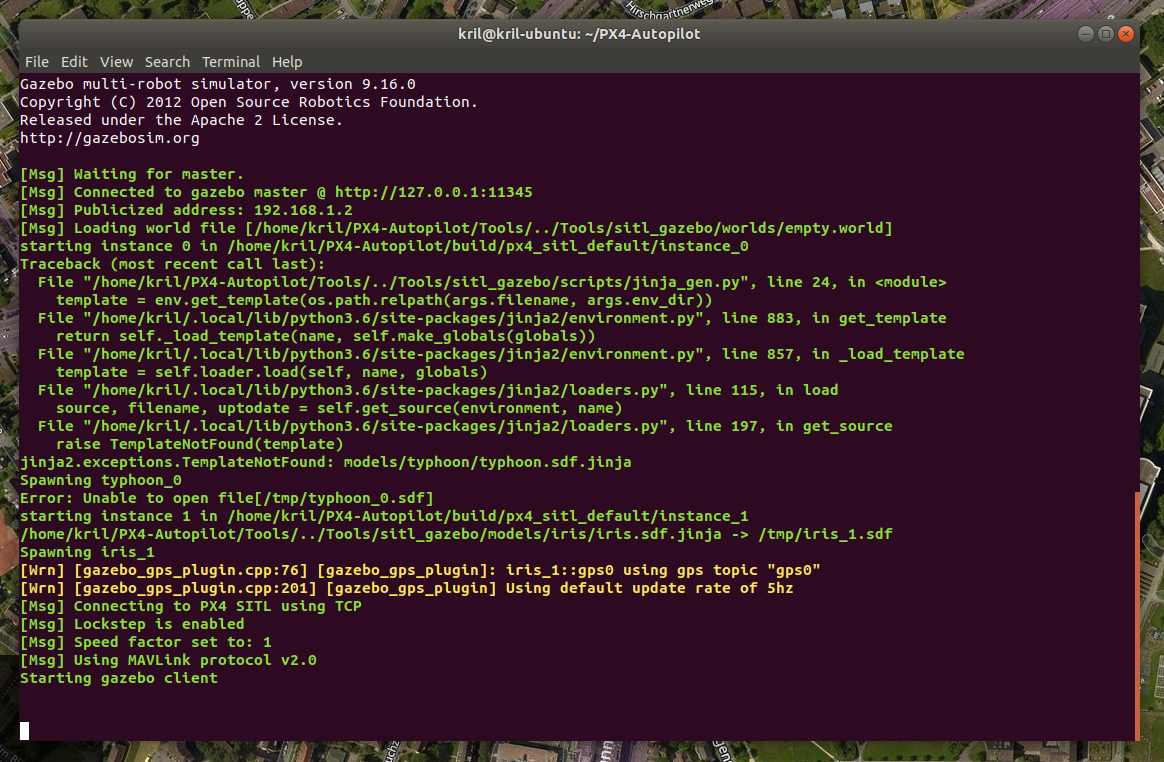
bash Tools/gazebo_sitl_multiple_run.sh -s "typhoon:1,iris:1"
This is the output:
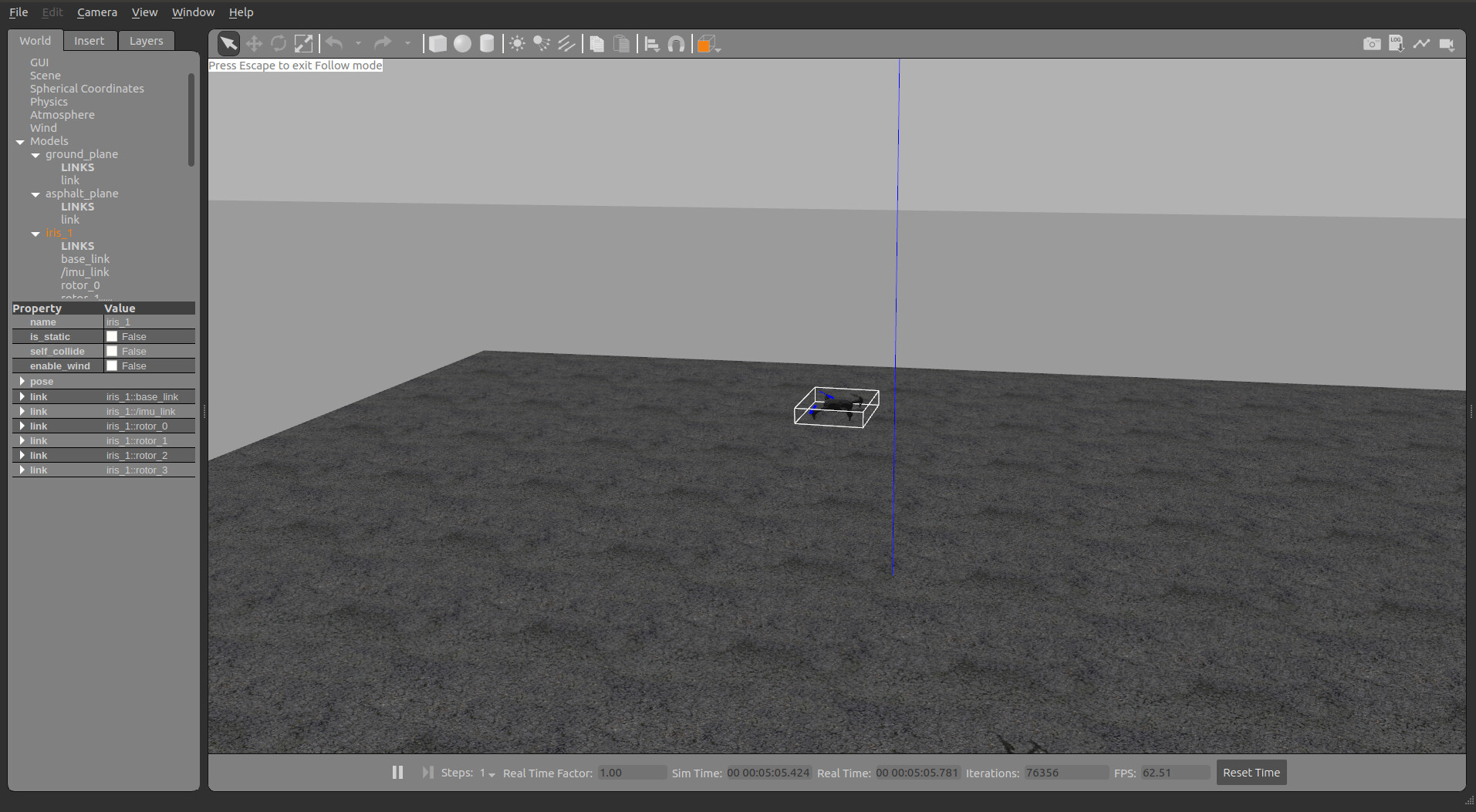
This is the result on Gazebo (after giving takeoff command from QGroundControl):
As you can see, only Iris is added to the world.
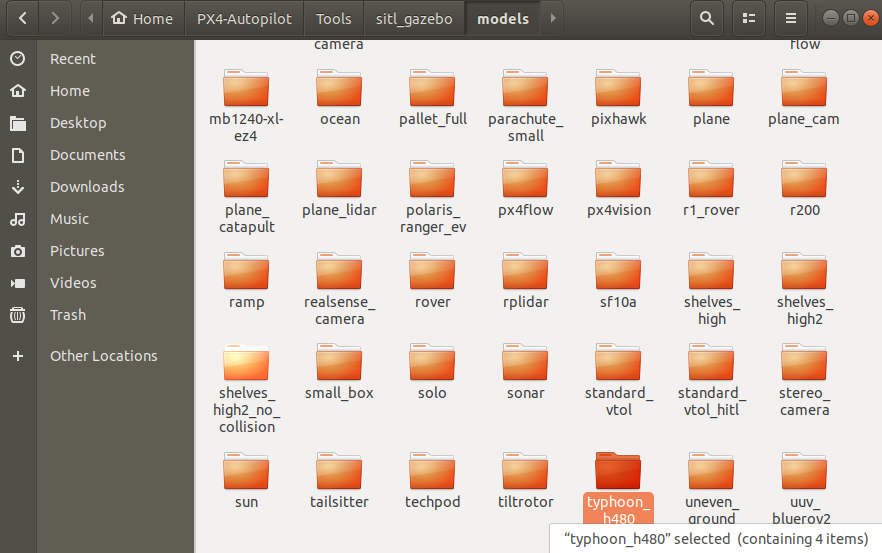
Rookie mistake! I’ve checked the directory for models and realized the full name was typhoon_H480.
After fixing the command as:
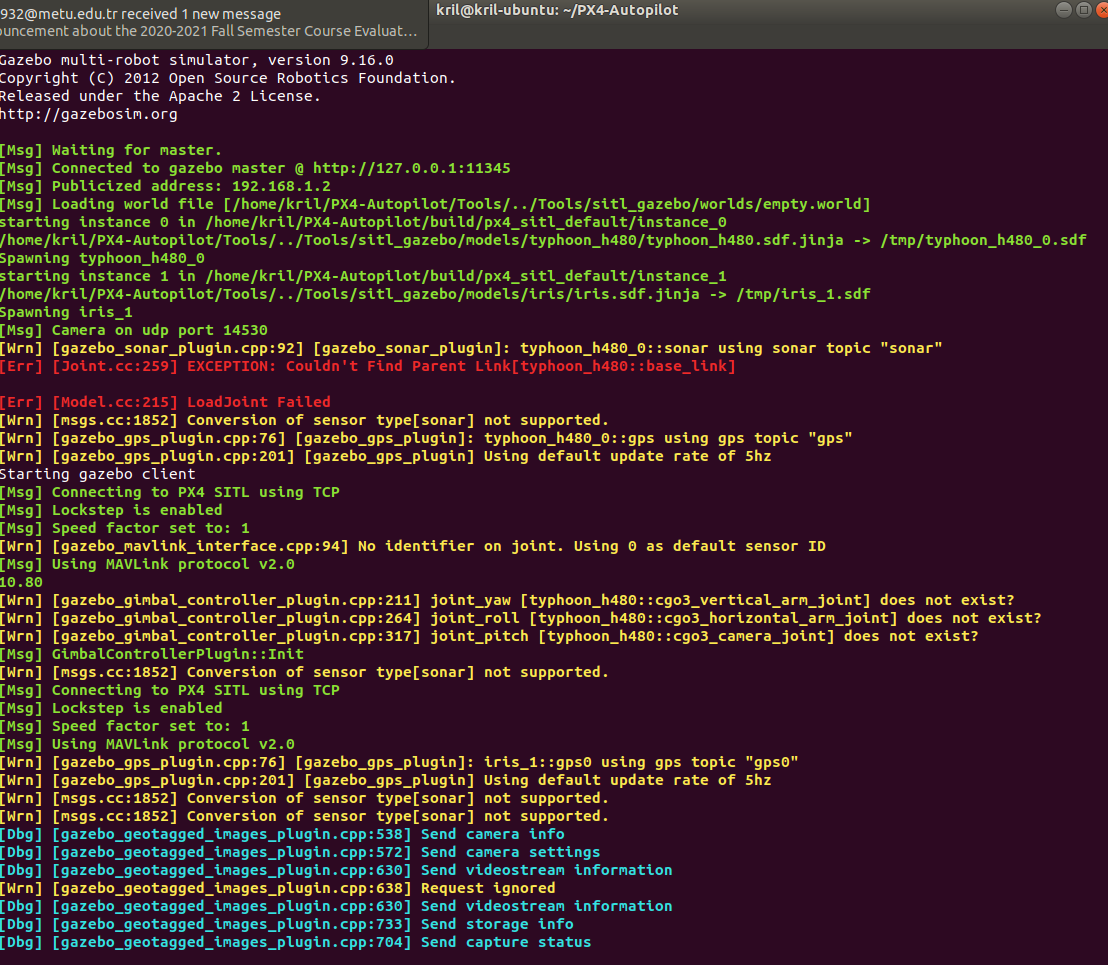
bash Tools/gazebo_sitl_multiple_run.sh -s "typhoon_h480:1,iris:1"
I can now see both!
However, when I press enter on terminal, I don’t see “px4” prompt (which usually opens when I start it using make px4_sitl gazebo_typhoon_h480) to manually direct takeoff commands from CLI. I assume I’ll need to use MavROS to actually send commands to control these two vehicles, right?
By the way, thanks a lot for everything involving this project, it really helps us during our graduate project.
@bonellia Good to see that you made progress!
You don’t see the px4 shell since you are running multiple instances of PX4, so it is working as intended 
@Jaeyoung-Lim
Could you please have a look at the following:
To be brief, latest updates broke the way I launch multi-vehicle setup with ROS (thus MAVROS) enabled. We are trying to have H480 and Iris to record images to train our model for drone detection project we have.