I am a student and I am currently working on Dynamic Soaring with PX4 Gazebo.
In order to simulate dynamic soaring, I created a new module named fw_dynamic_soaring in which I compute the energy and the wind gradients. It is just the beginning of the work and I don’t know if it will work after. However, before doing the rest to really do dynamic soaring, I tested if my code is working or not.
So, I launched px4 and I see in the files build/px4_sitl_default/boardconfig that the line “CONFIG_MODULES_FW_DYNAMIC_SOARING=y” has been added and in the file build/px4_sitl_default/px4_boardconfig.h, that the line “#define CONFIG_MODULES_FW_DYNAMIC_SOARING 1” has also been added.
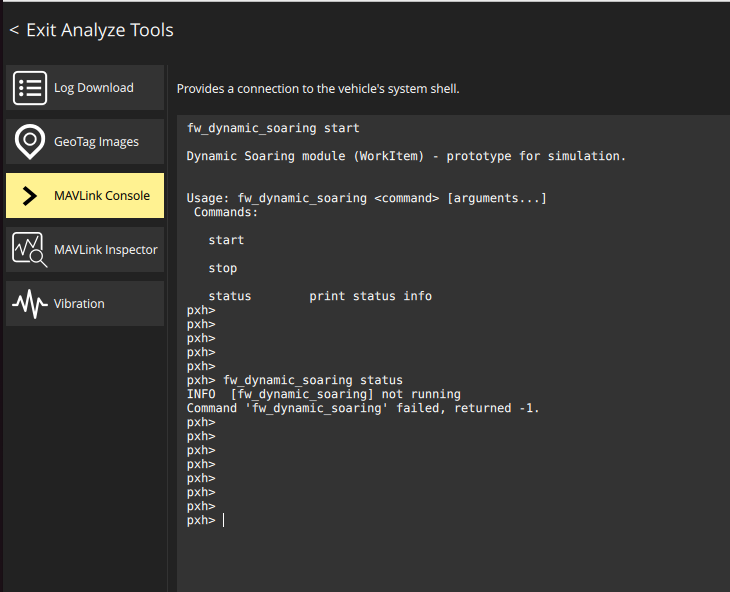
However, in the console, when I write “help”, I don’t see “fw_dynamic_soaring”. And when I type in the MAVLink Console “help”, the command “fw_dynamic_soaring’“ does not appear.
So, I think I missed something but I really don’t understand what. I checked the files Kconfig, fw_dynamic_soaring.cpp and the CmakeLists.txt and everything seems good (it is very similar to other modules like “fw_lateral_longitudinal_control”) while it does not seem to be recognized. Does someone have an idea to solve it or have had the same issue ?
Hi, could you share a link to the Github branch you’re developing on? (you can make a fork of GitHub - PX4/PX4-Autopilot: PX4 Autopilot Software and push is there) That would be easier for us to see if you missed something in the code
I am sorry, I don’t kown very well how to use Github. So, I added my files I created as an attachment. They are located in the folder : “PX4_Autopilot/src/modules/fw_dynamic_soaring”.
I think it is a problem of version because a colleague of mine uses a previous version of PX4 and it works perfectly. I don’t know why it doesn’t work now with the new version. Do you have any idea ? I tried again following these instructions : First Application Tutorial (Hello Sky) | PX4 Guide (main) and it also doesn’t work.
If you can create your custom module apps file and start it there, example here: ROMFS/px4fmu_common/init.d/rc.fw_apps.
Don’t forget to at it in CMakeLists.txt and rc.vehicle_setup.
You’re right, it works and my module '“fw_dynamic_soaring” appears in QGC.
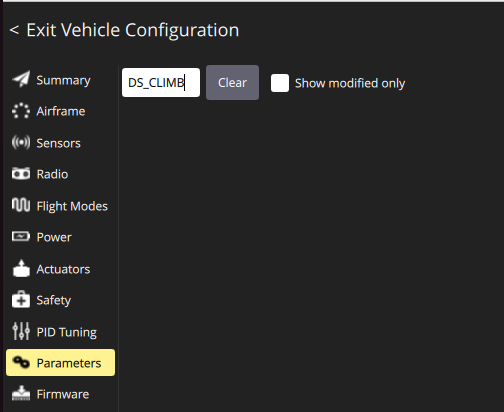
I have a new issue about parameters in my module. In my file “fw_dynamic_soaring_params.c” , the parameters are located in the group @group “FW DS “. But this group and its parameters do not appear in QGC parameters (even after refreshing these parameters).
I tried to see if it is just a problem of display. For instance, I wrote “param show DS_CLIMB_S”, or “param show DS_ENABLE”. And the parameters seem to exist and using “param set <the_params>” enables me to change its value or state.
However, as I said before, the group “FW DS” and the parameters inside (like DS_CLIMB on the picture) do not appear on QGC.
Do you have already experienced this issue or can you help me please ?
The parameters are only shown in QGC when they are actually used by the system. In your case, you said that “Even if I have written start, it says it is not running…”, so it’s probably not running, and that’s the reason why the parameters are not showing up.