I have connected rpi to pixhawk on telem2 port and publishing mocap data on /mocap/pose topic. The position value for z is not same for mocap/pose and local_position/pose.
for mocap /pose>>
---
header:
seq: 1526
stamp:
secs: 1505918137
nsecs: 129957914
frame_id: fcu
pose:
position:
x: 5.30004
y: 1.2797
**z: 1.96025**
orientation:
x: 0.901538723658
y: 0.425992599711
z: -0.0661677012611
w: 0.037149294027
---
local_position/pose
header:
seq: 1962
stamp:
secs: 1505918137
nsecs: 67410240
frame_id: fcu
pose:
position:
x: 5.30003929138
y: 1.27970004082
**z: -0.049612943083**
orientation:
x: 0.00923220180577
y: -0.00385768606231
z: -0.888187765534
w: -0.459371736031
---
on roslauch mavros window , I keep getting following messages>
[ INFO] [1505918071.621063490]: FCU: [lpe] mocap position init: 1.28, 5.30, -1.96 m
[ INFO] [1505918071.671072088]: FCU: [lpe] reinit P (0, 0) negative
[ INFO] [1505918071.720345636]: FCU: [lpe] reinit P (0, 0) negative
[ INFO] [1505918071.770876366]: FCU: [lpe] reinit P (0, 0) negative
[ INFO] [1505918071.822297508]: FCU: [lpe] reinit P (0, 0) negative
I have tried to fly drone in Gazebo simulation and it works fine with the current coordinate system. please could someone point out what is going wrong here.
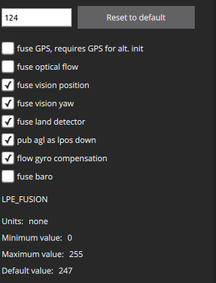
my LPE_FUSION parameter is following>
@mhkabir please reply I have stuck and not getting any help