I am building a multirotor that would hover at a set altitude and move like a tank (skid steer) with two motors that pull it forward and control Yaw using differential thrust.
In the previous version of PX4, I made a custom mixer file to mix Aux 1 (desired forwarding throttle) and yaw using the mixer lines below but I have no idea how I do it with the new system. The original system was limited to manual control of forward thrust and I would like the controller to use the forward thrust when doing position hold and waypoint following instead of pitching forward to move forward.
At the moment I have yaw being sent to the motors by setting their position and orientation to forward with SYS_CTRL_ALLOC = 1, CA_airframe = custom and that is really slick but how do I mix in the desired forward thrust?
Any assistance would be appreciated.
Example of the legacy style mixer file
R: 4x
5: right
M: 2
S: 0 2 -10000 -10000 0 -10000 10000
S: 3 5 10000 10000 0 -10000 10000
6: left
M: 2
S: 0 2 10000 10000 0 -10000 10000
S: 3 5 10000 10000 0 -10000 10000
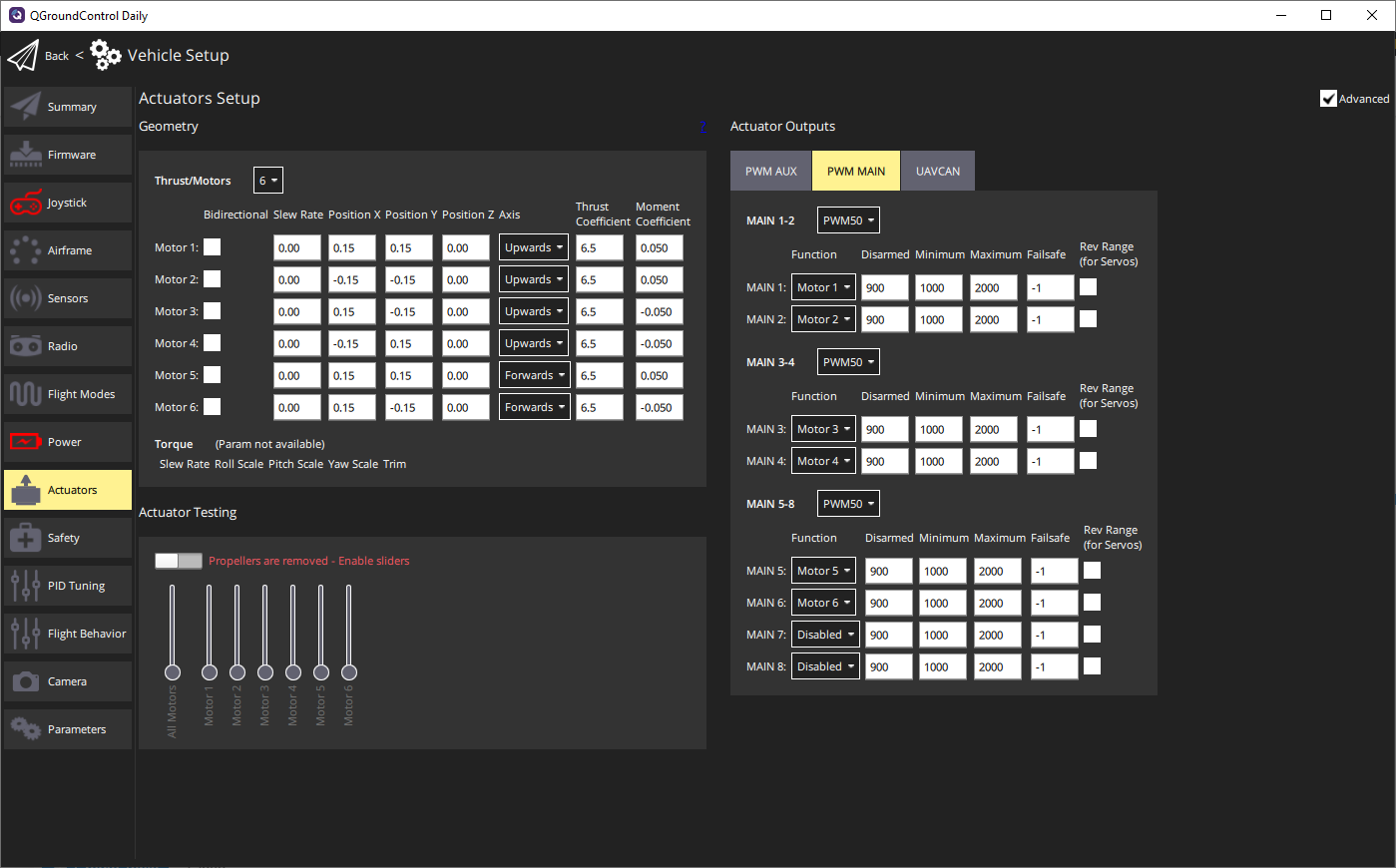
Current actuator tab