We use the PX4, QGroundControl and the PX2.1 Cube for a custom VTOL-Configuration with four engines.
The custom mixer and airframe data had been been downloaded to the pixhawk 2.1 through actualization of the firmware with the console. After that all sensors were calibrated precisely. ESCs were also calibrated as also the power source. Safety switch was pressed. And finally the arm switch was moved and the idle speed throttle was too high.
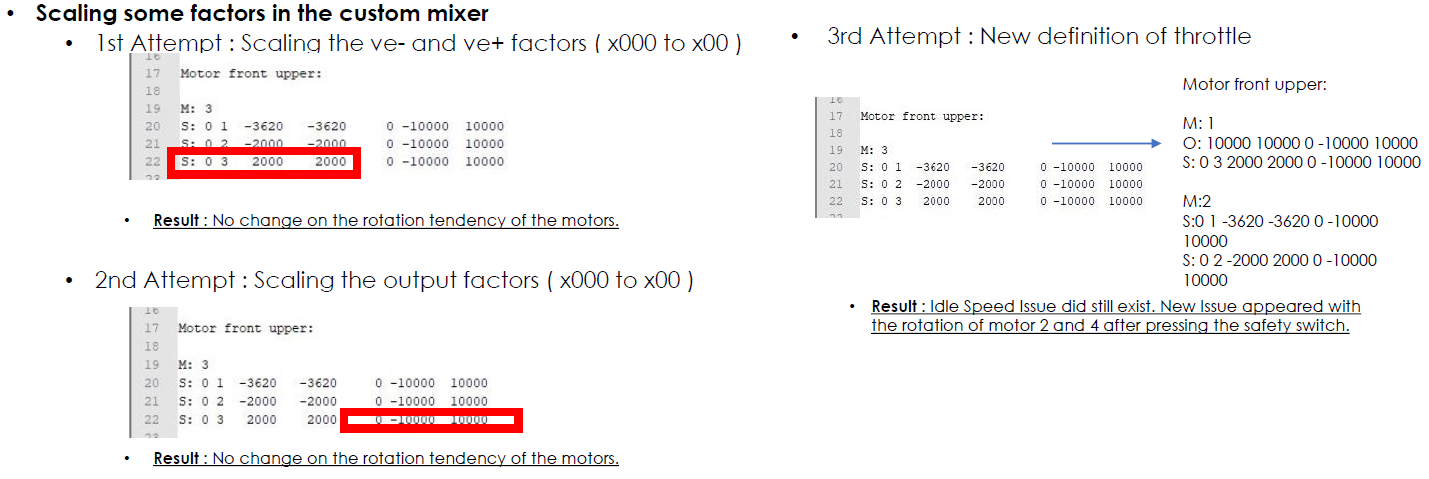
For solving we have:
- Scaled the ve- and ve+ factors (x000 to x00)
- Scaled the output factors (x000 to x00)
- New definition of throttle
Later we changed the maximum and minimum PWM. Within changing the parameters the other one (min/max) was changing automatically. So we have the problem that the idle speed is to high and the maximum speed to low.
Is there a possibility to set idle speed on a minimum and let at the same time maximum speed at the highest level?
Thank you in advane