I have a node that publishes into /mavros/vision_pose/pose topic and I would like to fuse the position (x & y) into /mavros/local_position/pose. GPS will not be available so I deactivated it in Gazebo simulator (“gpssim stop”). I am using EKF2 with the parameters EKF2_AID_MASK = 8 (vision position fusion) & EKF2_HGT_MODE = Vision.
Example message from /vision_pose/pose: (using “rostopic echo /mavros/vision_pose/pose -c”)
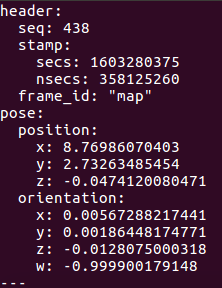
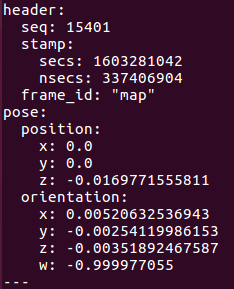
In the /local_position/pose topic x & y value of the position always stay 0.
Any Idea what I am doing wrong?