I have several questions about using the mavros_extras/distance_sensor plugin.
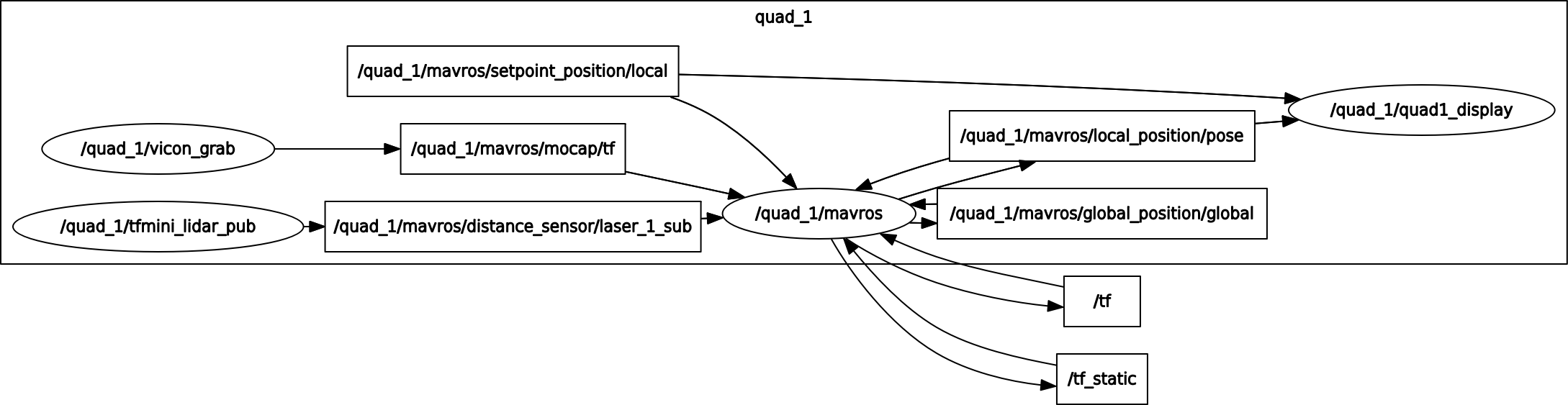
First, I am able to publish the message to the /mavros/distance_sensor/laser_1_sub, and be able to echo the data from the topics. All information is correct.
However, I am not sure about the following points:
- When I use the QGround Control, and check the distance sensor from MavLink Inspector, apparently the firmware only uses the sensor ID 0, even I did comment it from the px4_config file. Please see that attached pic.
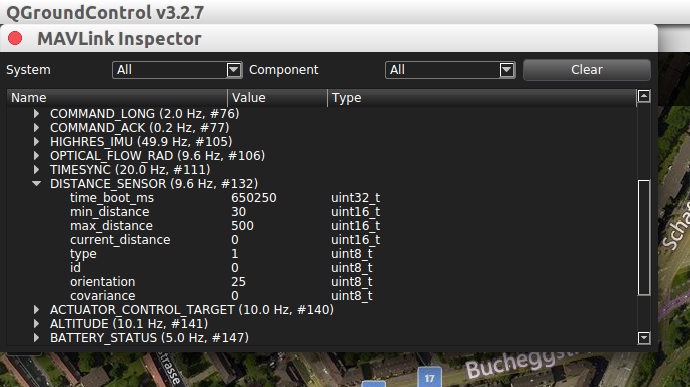
How do I make sure that the firmware is using the laser_1( id 3) instead of the hrlv_ez4 (id 0).
2. What should I do to configure Optical_Flow to use the distance from laser1_sub for distance from ground. I already set LPE_FUSION with optical flow ticked.
3. About the tf transformation, will setting something like this in the px4_config work:
laser_1_sub:
subscriber: true
id: 3
orientation: ROLL_180
frame_id: "lase_1"
field_of_view: 0.0 # XXX TODO
send_tf: true
sensor_position: {x: 0.0, y: 0.0, z: -0.1}