Hello,
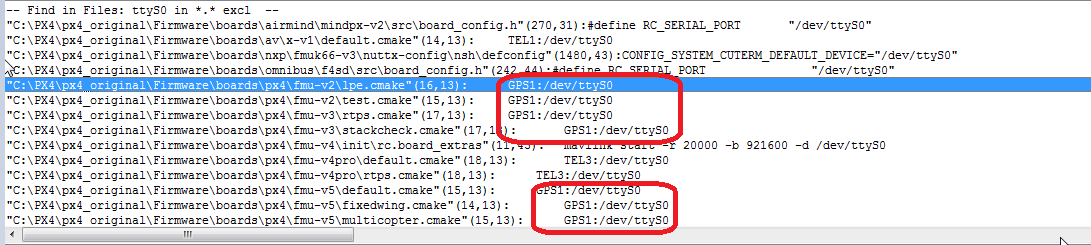
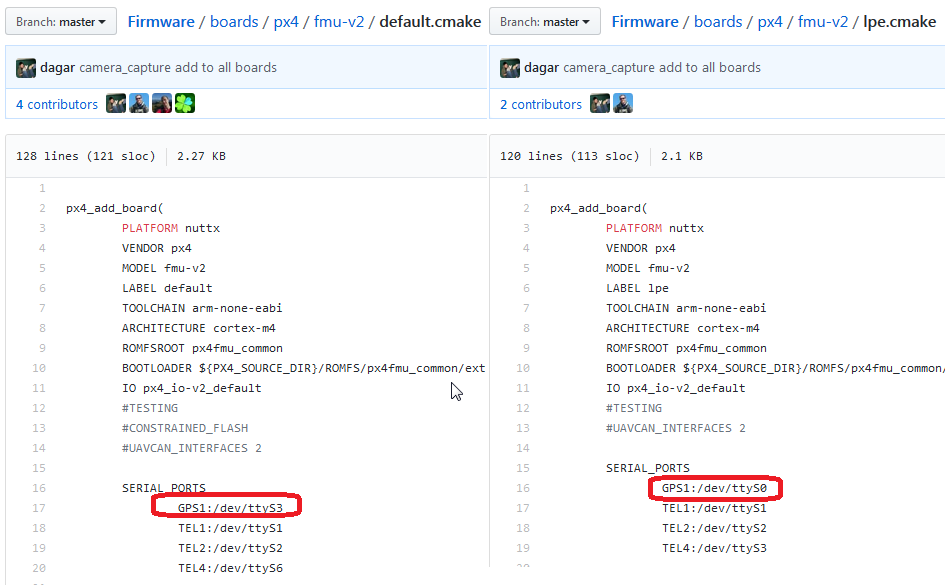
I have discovered today a strange issue - after make px4_fmu-v2_lpe upload i power on my copter, then i go to Mavlink console, then gps status and i see that GPS application is started with serial /dev/ttyS0. And of corse i does not have a GPS position. When i stop GPS and then start it with command gps start -d /dev/ttyS3 - it’s ok, and copter have GPS position, and i can fly in Position mode - with is the issue? Taking into account that i have not changed any parameter and i have made git pull from PX4 repository just before compiling.
Regards.