hello, my drone met some problem recently.
i am using neo6m gps, and lpe shows strange behavior. lpe shows local position around (0,0) when pixhawk is powered, and when i hold drone and move 10 meters towards north, local position goes to (0,10), then it goes back to (0,0) slowly.i tried several times and no matter how i move, lpe can ‘feel’ the change of position and then goes back to (0,0), that make me confuse.
i set lpe_fusion only use gps, baro.
any suggestion will be help.
here is the log:
https://logs.px4.io/plot_app?log=0f40a4dc-e056-4edd-915f-559bf66aaff9
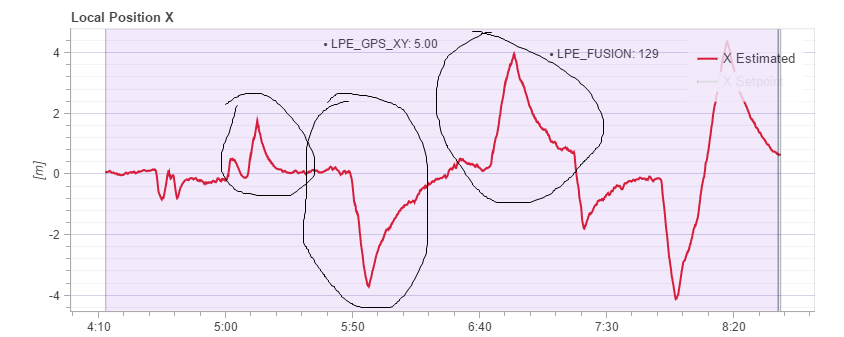
as the image shows, lpe x goes back to 0 while actually drone was not moving at that moment.
i will try to build firmware again and upload to board.
Hi, I know this is an old topic but I am having the same problem. did you know how to solve this ?