Hello all,
We are constructing an indoor drone project by using a motion capture and without GPS.
We are totally using @Stifael 's offboard code on a PX4 drone, and we input ENU position to MAVROS.
We made a simulation environment with a virtual drone without GPS, and The algorithm totally worked well on the simulator.
But when we are using the same configuration on the real drone, the setpoint postition command does not work.
However, the yaw control works well…
Here is my log here, only 5 seconds;
https://review.px4.io/plot_app?log=64b11738-1458-4893-b9cb-95cae93b765e
It seems that I had something wrong with the velocity, showed below
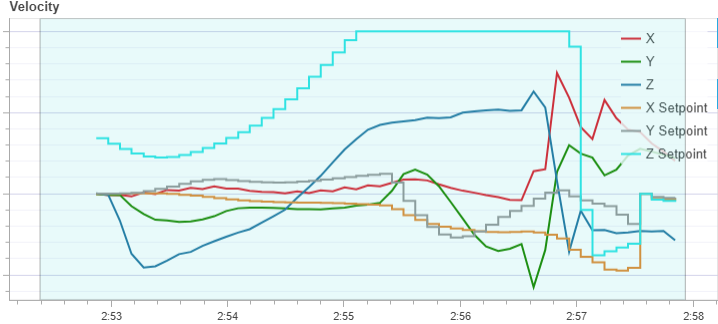
But I’m not sure where the problem is and how to figure it now.
And I found a success log of other people,
https://logs.px4.io/plot_app?log=aa944e78-073f-49fd-81ea-734d19aa0216
The difference of log that what I saw are the thrust and velocity.
I compared the parameter of PX4, but it seems that we are nearly using the same param config.
I would appreciate if someone comment or reply to this topic, any of your advice might be very useful!
Thanks in advance,