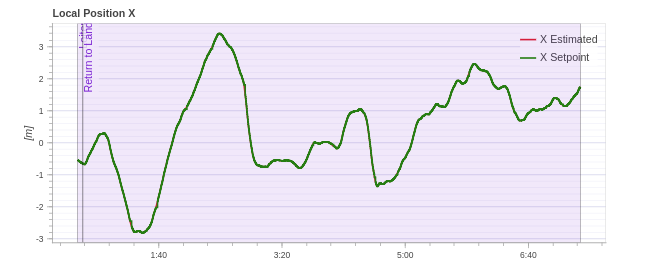
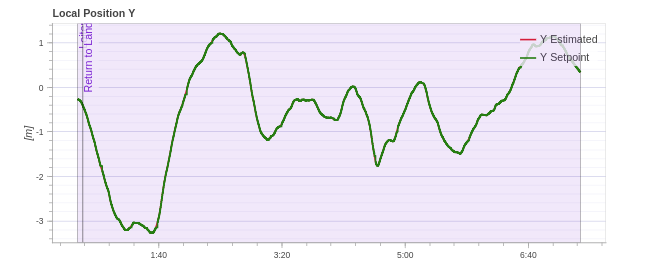
i have a hexcoptor with a new pxracer flight controller. when i power it up and keep it stationary on ground the local position keeps changing e.g. on QGC analyzer, the x, y and (z to some extend) keeps varying upto 6 or 7 meters. is this normal or is there something wrong with my fcu or the firmware. i am using px4 v1.8.0. i can share detailed logs if needed. attached is the screen shot of the local position.
Hi, what kind of sensors did you use? GPS? Optical flow? or vision?.
No matter which estimator you use, without any additional sensors such as GPS or optical flow sensor, fc cannot estimate exact position and drift a lot.
It tries to “guess” its position from noisy accelerometer and gyro which also tends to drift in long term.
What GPS receiver did you use for the drone?
The horizontal position accuracy normally as low as less than 1m but yours is around 3m and that is why your position estimation is not good.
This is maybe due to electric interference with the antenna and can be reduced by having the GPS receiver far from any electrical circuits.
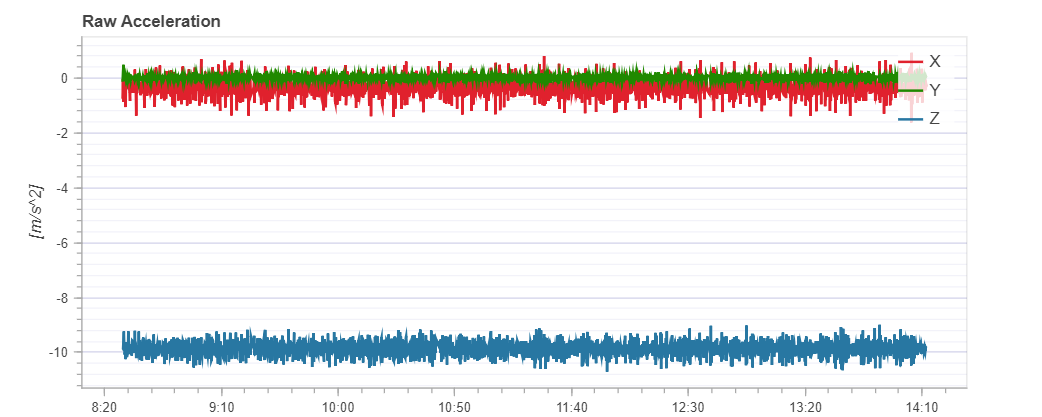
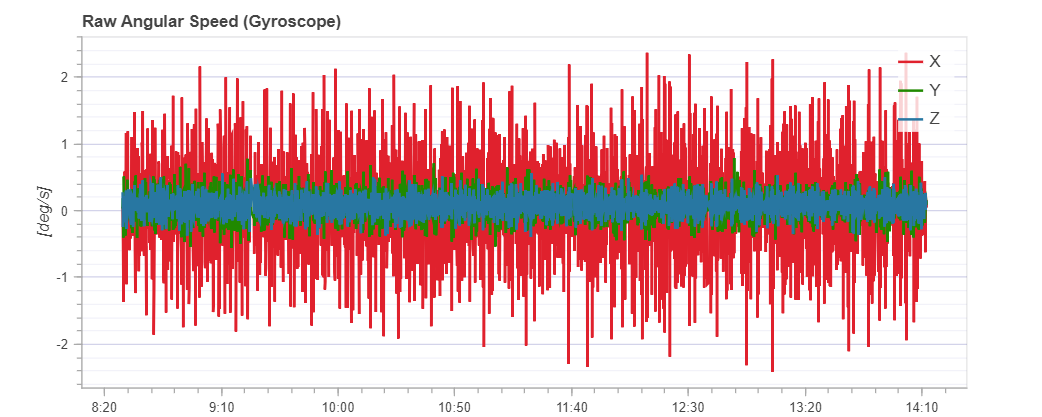
understood. thank you very much for the explanation. the gps i am using is SE100 which has ublox NEO M8N if i am not wrong. i tried purchasing it from a reliable source. i will try improving the EMI for the gps. one last thing, i just need your opinion whether these IMU graphs are normal or is there anything wrong with Acel or gypro. the reason being,i want to rule out knockoff components in the fcu.
i tried improving the gps isolation and it did improve the results. the accuracy is down to ±3m. in open space it would improve further. but i guess i would need vision based position if i want better accuracy. thanks again for the help.
Glad to hear you got the better results!
Depending what you are trying to do, vision aid may not help solving the issue.
Please keep in mind that vision sensor is vulnerable to external conditions such as low light, vibration , focal length and viewing angle etc.
Sometimes it works but some don’t.
Good luck! and fly safe.